
双目摄像头以太网传输#
实验Vivado工程为“an5642_lwip_double”。
前面介绍了OV5640摄像头的HDMI显示,但有些场合下,需要把视频传输到上位机,便可以利用以太网进行数据的传输,本章利用LWIP的udp将摄像头数据传输到上位机。
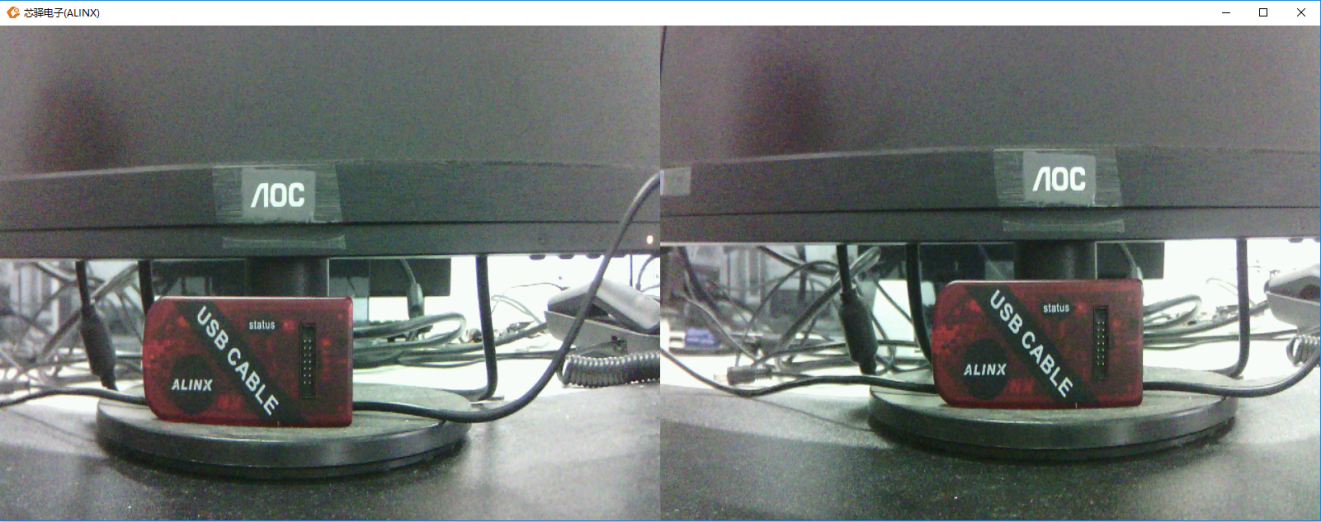
上位机显示效果
硬件环境搭建#
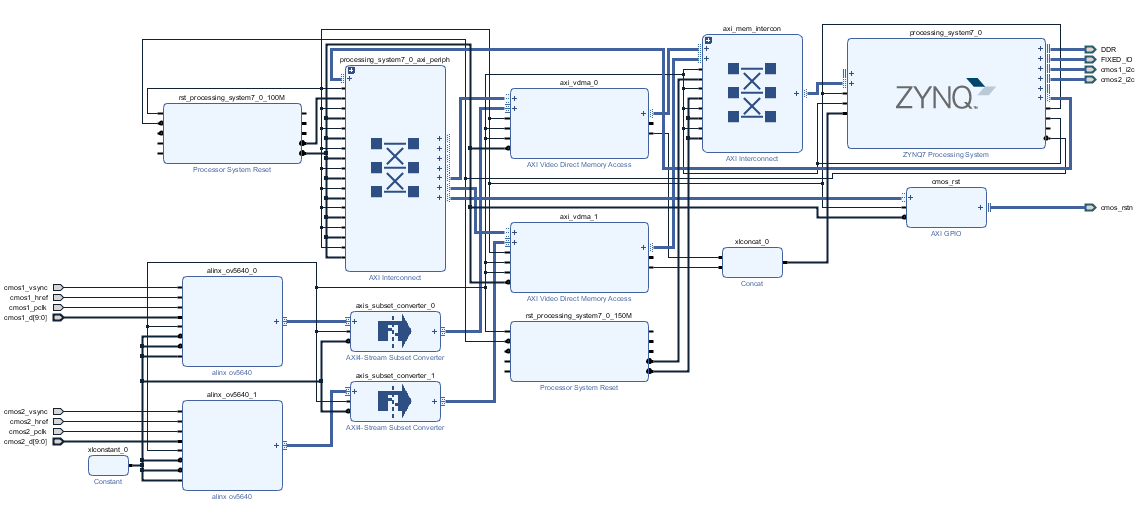
整体框图如下
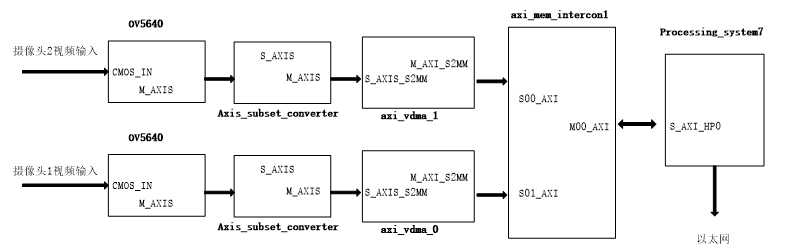
本实验是基于OV5640摄像头采集显示二的例程。由于本实验不需要HDMI显示,需要把HDMI显示相关模块删除,v_tc模块,dynclk模块,vid模块,osd模块,hdmi_rst复位,hdmi_i2c,axi_vdma_0
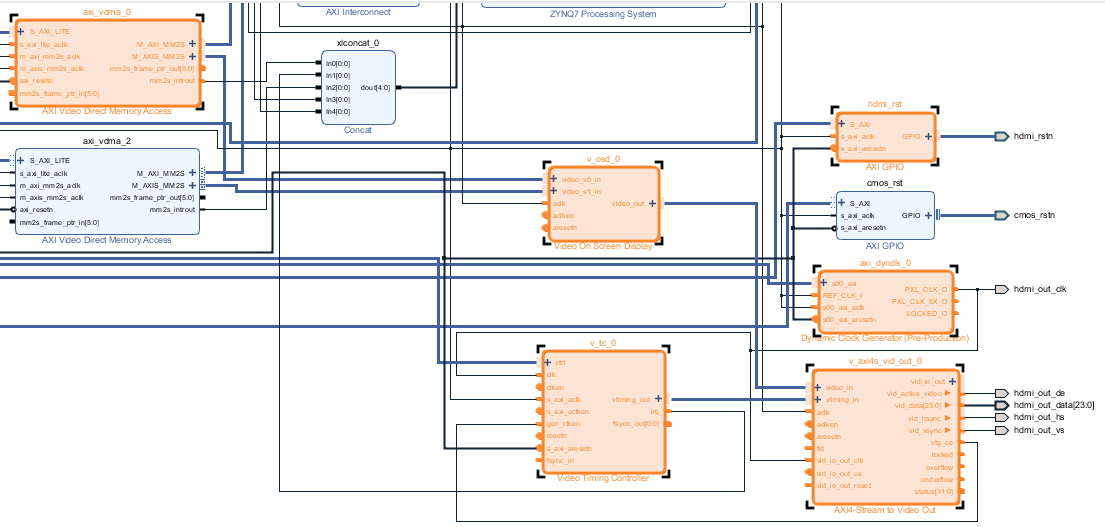
将Concat修改成两输入,interconnect修改成两个slave,将vdma修改名字
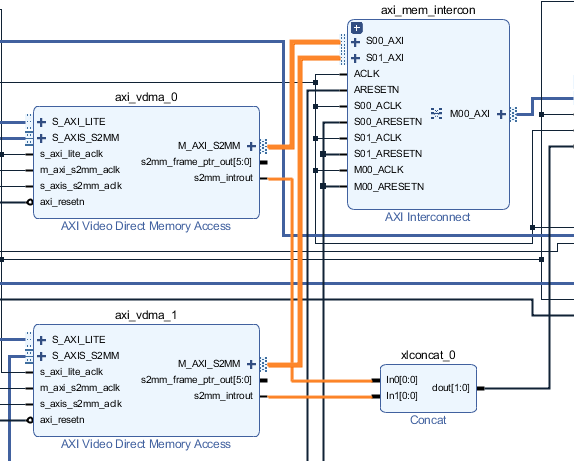
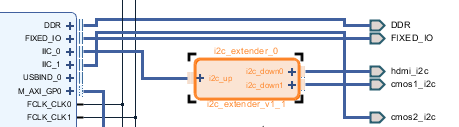
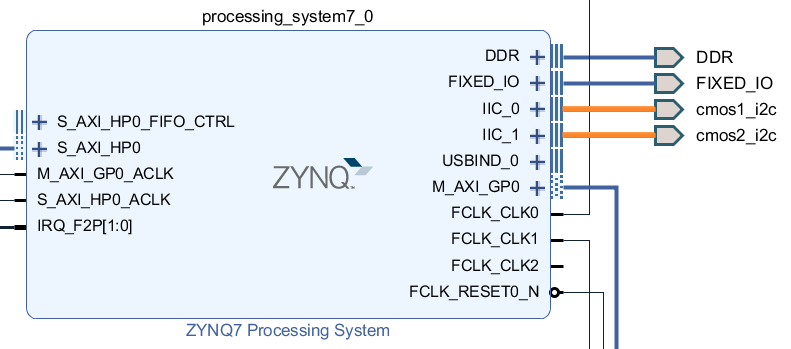
将两个cmos i2c连接如下
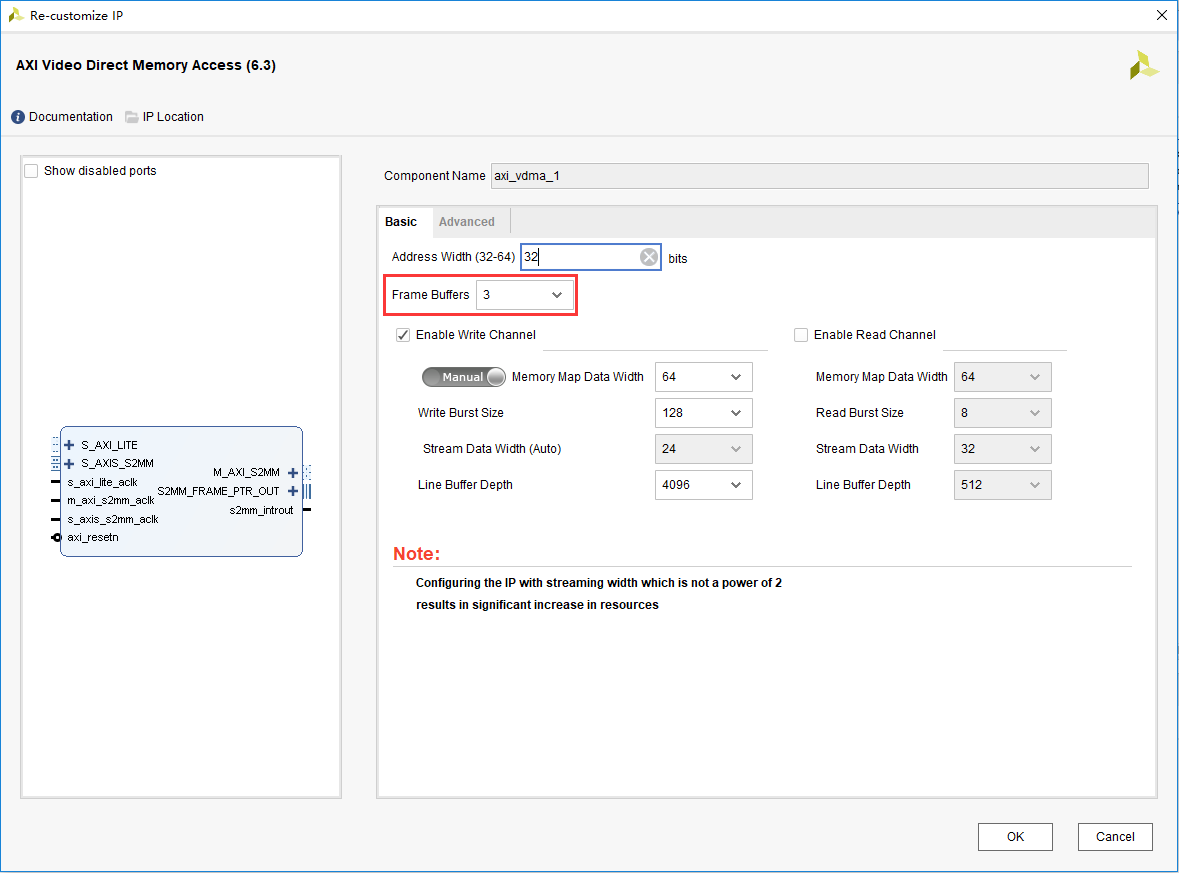
Vdma与之前不同之处在于,将Frame Buffers设置成了3,也就是可以三帧缓存,通过应用程序来控制。
删除掉多余的HDMI引脚,最终连接如下
Vitis程序开发#
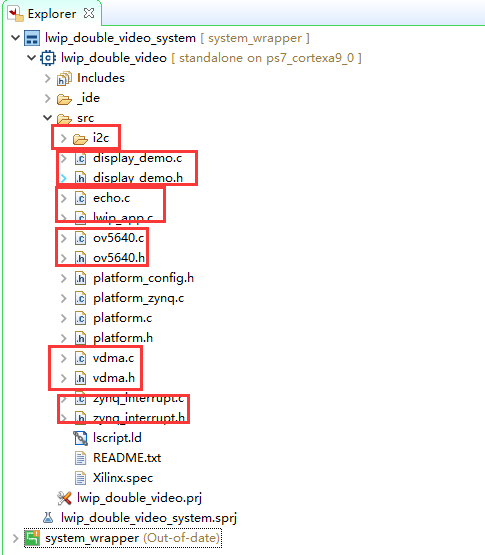
程序设计比以前复杂些,主要分为i2c控制,主控制模块display_demo.c;lwip控制模块echo.c,lwip_app.c;ov5640模块ov5640.c;vdma模块vdma.c;中断模块zynq_interrupt.c。整个程序主要分为两大部分,一是图像的控制,另一个是以太网数据的传输。
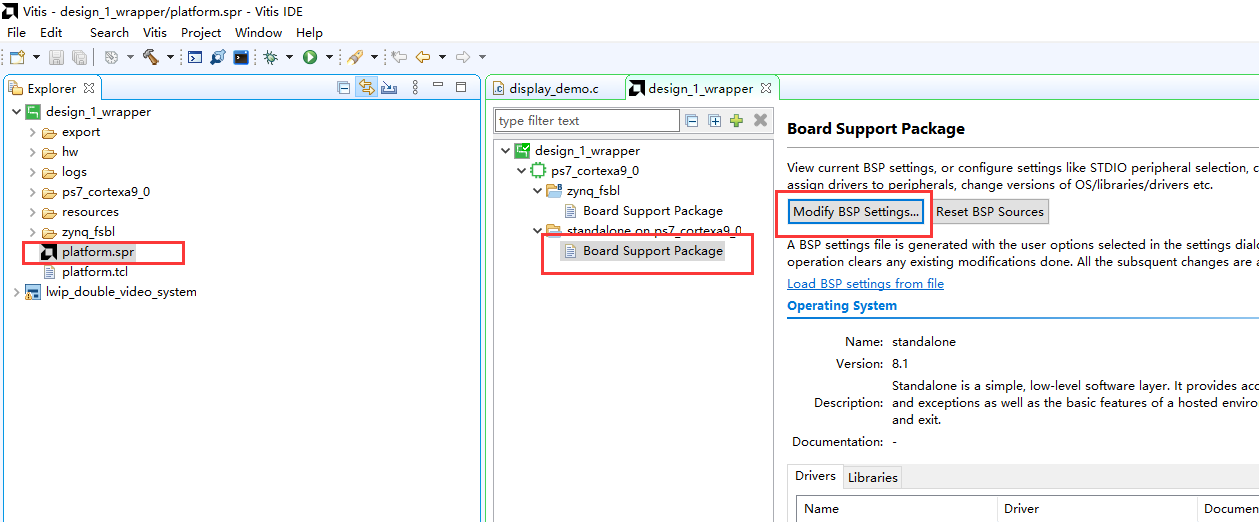
新建工程之后,需要进入BSP设置
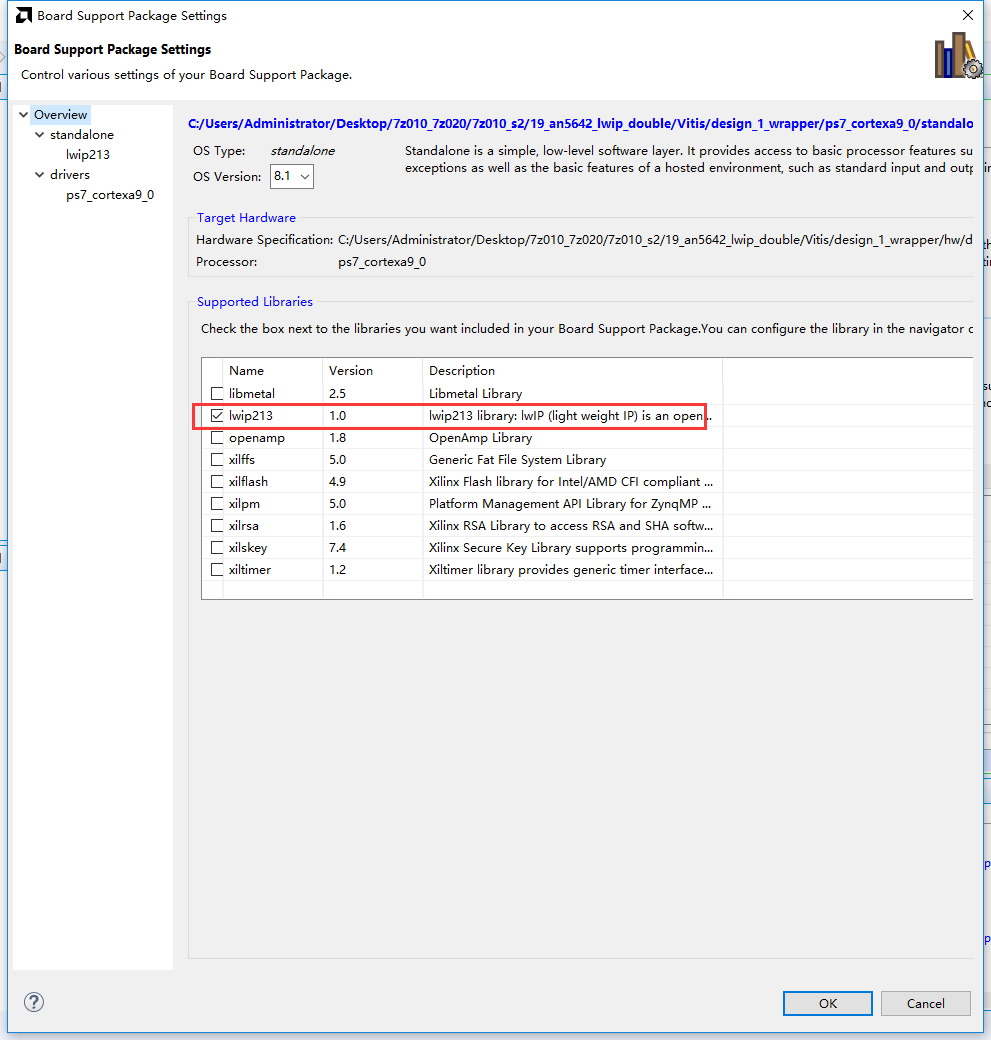
使能LWIP函数库,点击OK
图像控制部分#
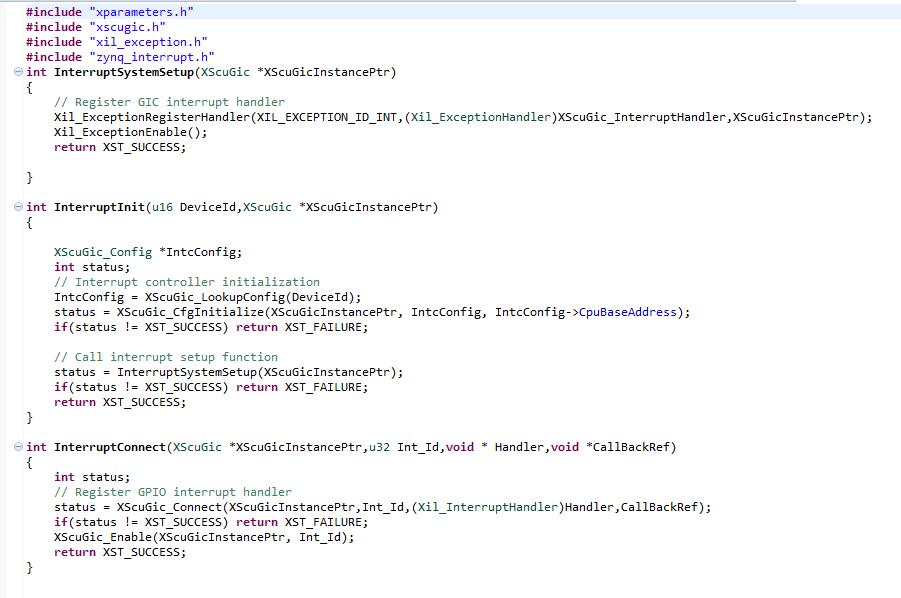
OV5640模块和VDMA模块前面都已经接触过,在本实验中添加了VDMA的中断,中断控制器在zynq_interrupt.c中初始化
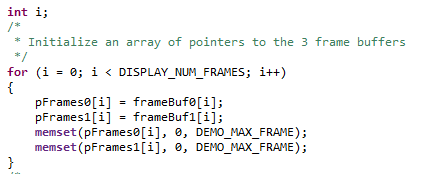
在display_demo.c的main函数中,进行三帧缓存的初始化,DISPLAY_NUM_FRAMES宏定义设置为3,初始始化pFrame0和pFrame1指针,pFrame0指向摄像头1的缓存,pFrame1指向摄像头2的缓存,并将缓存数据清零。
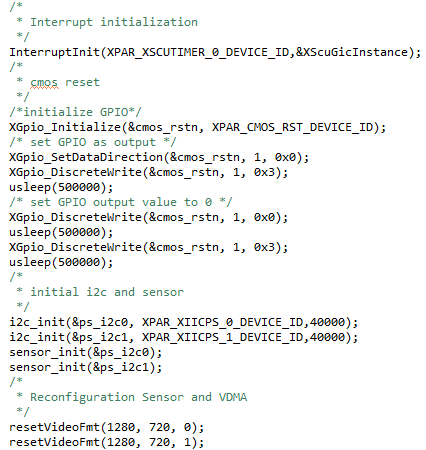
接下来是初始化中断,cmos复位,初始化i2c,配置sensor,复位图像,设置为1280*720
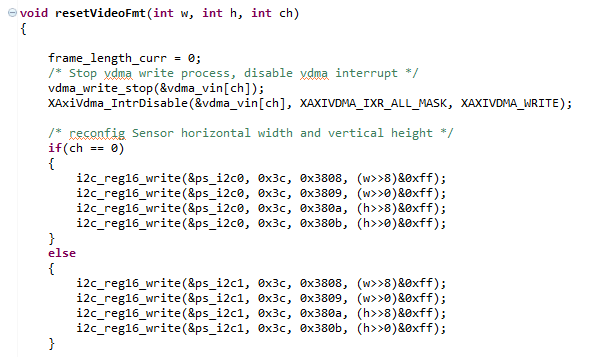
在resetVideoFmt函数中,停止vdma,关闭中断,根据w,h,ch的值重新配置sensor的分辨率
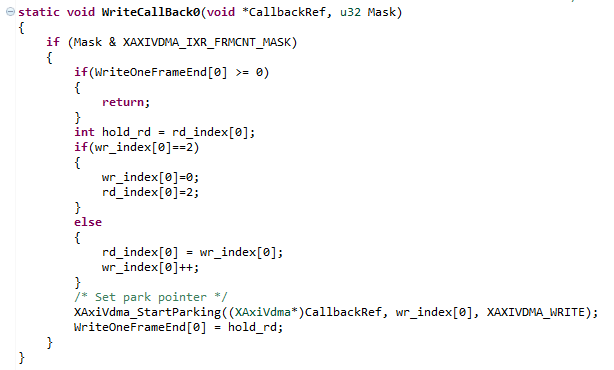
并初始化vdma写通道,将pFrame的三个缓存地址写入S2MM StartAddresses寄存器。利用xAxiVdma_SetCallBack函数设置回调函数,WriteCallBack和WriteErrorCallBack
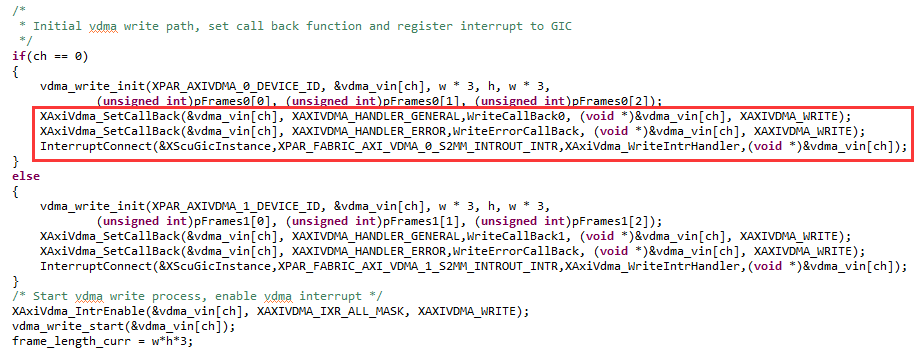
WriteCallBack回调函数功能为判断中断状态是否是FrameCount中断,如果是,将wr_index加1,并利用XAxiVdma_StartParking设置park pointer寄存器的WrFrmPtrRef,修改当前缓存的Start Addresses,参数为wr_index[0] ; 这里有一个很重要的变量WriteOneFrameEnd,初始值为-1,可以简单理解为一帧写结束,此信号用于图像处理与LWIP之间的交互,稍后会在LWIP处理部分讲到。
LWIP 控制部分#
下面介绍LWIP部分内容,与上位机通信时,采用UDP传输,在UDP数据包中自定义了协议,如下所示:
一、获取板卡信息
(1)询问命令(共5字节,由上位机通过以太网发送)
字节数 |
1 |
4 |
|---|---|---|
命令信息 |
Header |
0x00020001 |
(2)应答命令(共16字节,由开发板通过以太网发送)
字节数 |
命令信息 |
|---|---|
1 |
Header|0x01 |
4 |
0x00020001 |
6 |
板卡MAC地址 |
4 |
板卡IP地址 |
1 |
0x02 |
二、获取数据
(1)控制命令(由上位机发送数据请求)
字节数 |
命令信息 |
|---|---|
1 |
Header |
4 |
0x00020002 |
6 |
板卡MAC地址 |
1 |
摄像头通道选择,数值1代表仅打开摄像 头1,数值2代表仅打开摄像头2,数值3代表同时打开两个摄像头 |
1 |
启动信号,0表示关闭上位图像显示,其他表示打开图像显示 |
(2)应答命令(由开发板发送)
字节数 |
命令信息 |
|---|---|
1 |
Header|0x 01 |
3 |
0x 000200 |
1 |
通道标识,数值2代表摄像头1,数值3代表摄像头2 |
3 |
序列号,以太网包序号,用于上位机识别 |
N |
图像数据 |
每个UDP包都包含有Header,在第一个字节,其格式如下:
比特位 |
值(0) |
值(1) |
|---|---|---|
bit 0 |
查询或控制 |
应答 |
bit1~bit7 |
随机数据 |
注:当应答时,高7位随机数据保持不变,bit0设置为1
工作流程为:
上位机发送询问命令
开发板应答询问
上位机发送控制命令请求数据
开发板发送数据
步骤3和4循环
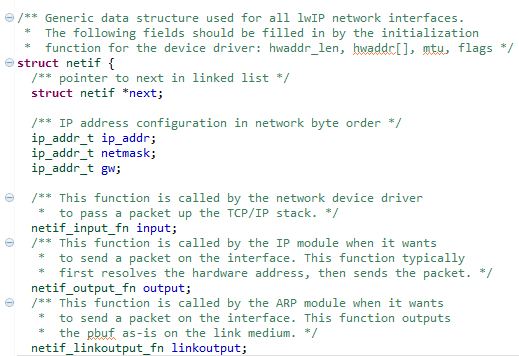
2. LWIP控制部分主要包含两个部分,一个是udp读写部分echo.c,另一个是与图像缓存的交互部分lwip_app.c,在理解程序之前,首先需要了解几个结构体,netif, udp_pcb, pbuf。 在Lwip中,很多结构体都是以链表形式存在的。 每个网络接口都有一个对应的结构体netif表示,是协议栈与底层驱动接口模块。在结构体中定义了链表中下一个结构体,IP地址,子网掩码,网关,输入函数,输出函数,最大传输单元等。对应文件为netif.h和netif.c
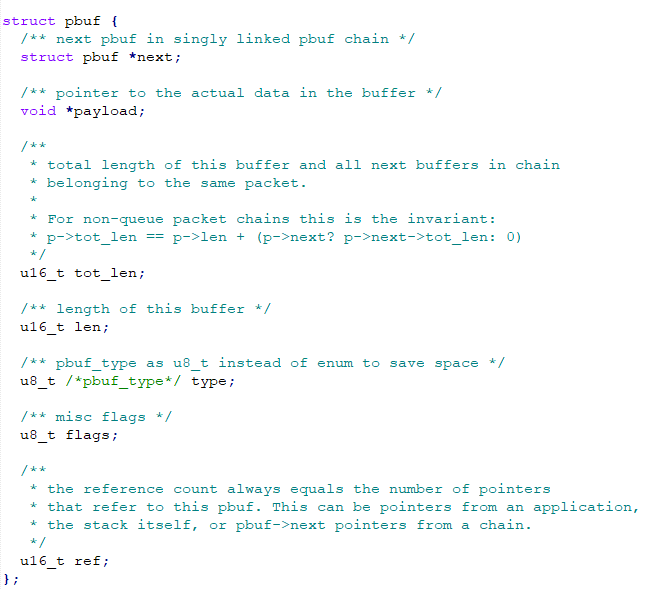
pbuf结构体用于存储接收或发送的数据,也是链表形式。
pbuf *next指向下个pbuf的地址;payload指向有效载荷数据的地址,以udp举例,是除去帧头,IP header, udp header的有效数据;tot_len是当前数据加上后面所有链表pbuf数据之和,如果后面没有链表了,tot_len等于len;len指当前pbuf的数据长度;type指pbuf类型,分为PBUF_RAM, PBUF_ROM, PBUF_REF和PBUF_POOL;
相关文件为pbuf.h和pbuf.c
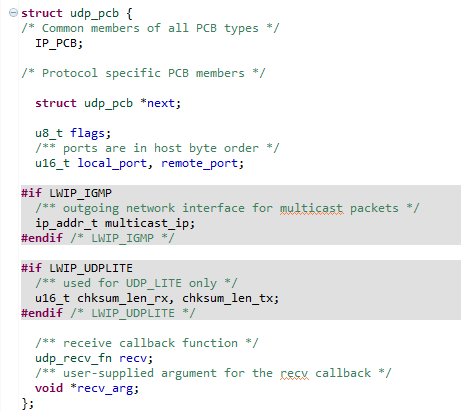
udp_pcb指udp的协议控制块,主要成员包括,下个pcb,本地端口号,对端端口号,接收回调函数等,相关文件为udp.h和udp.c
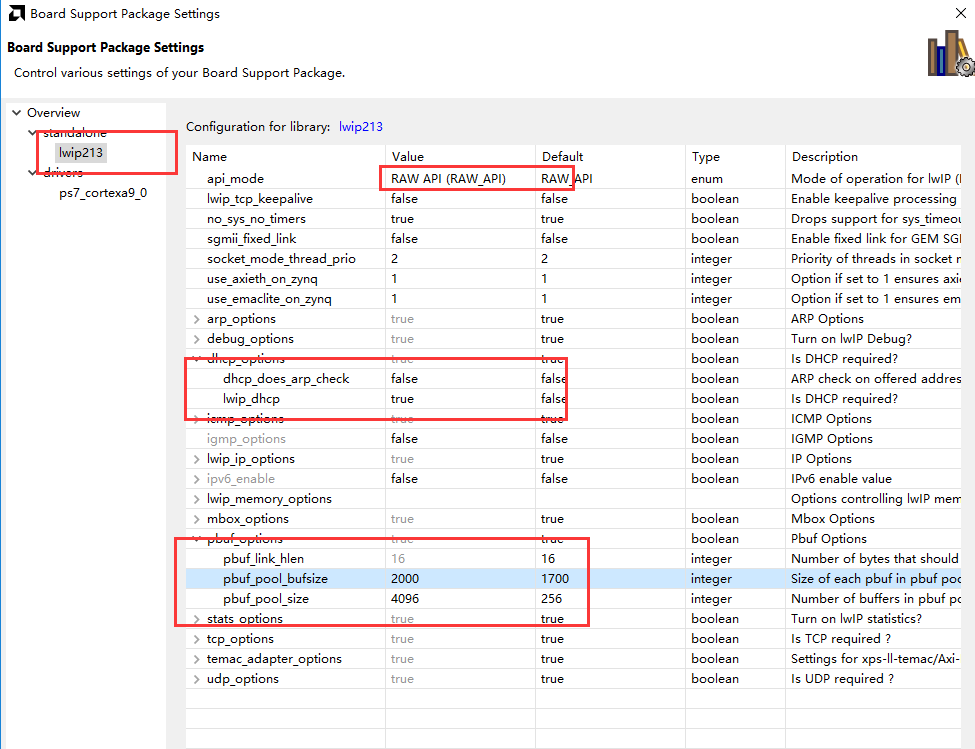
对以上结构体有些概念后,下面介绍程序部分的使用。首先需要进行lwip的设置,打开Board Support Package Settings
打开后点击lwip213,api_mode设置为RAW API,dhcp_options打开dhcp功能,pbuf_options选项将pbuf_pool_size设置大一些,增大缓存空间,提高效率。点击OK
 s
s
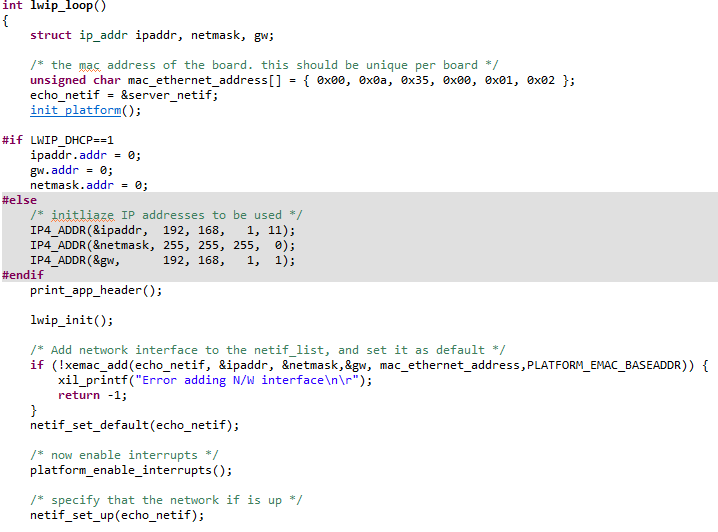
接下来进行lwip的初始化,在lwip_app.c文件中,lwip_loop函数进行初始化工作,echo_netif为定义的netif结构体类型的指针,首先设置好板卡的MAC地址,IP地址,子网掩码,网关信息,利用xemac_add函数添加到netif结构中,并利用netif_set_default将echo_netif设置为默认网卡。利用netif_set_up打开此网口。
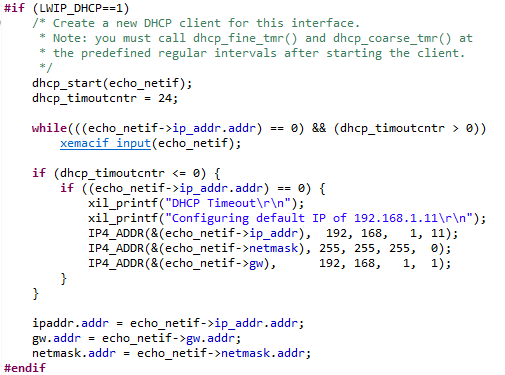
进行DHCP的设置
至此,基本上设置完毕。
之后开始调用udp的应用函数,此函数声明定义在 echo.c文件中,

在此函数中,首先利用udp_new创建一个pcb结构体,返回类型为udp_pcb的指针,并赋值给udp8080_pcb; 利用udp_bind函数绑定地址和端口给结构体,共有三个参数,第一个是pcb结构体变量,第二个是IP地址,每三个是端口号。通常情况下IP地址填入IP_ADDR_ANY。利用udp_recv函数绑定回调函数,本实验中绑定的回调函数为udp_receive
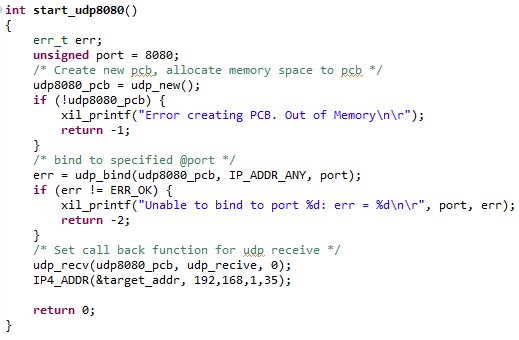
以上是udp的初始化过程。
udp接收为udp_receive函数,前面已经设置为udp接收的回调函数,功能为接收的上位机udp命令,并判断是否是自定义的协议。如果是询问命令,启动应答。如果是控制命令,根据命令重新设置摄像头分辨率。
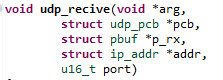
在udp_receive函数中调用了transfer_data函数,作用是发送udp数据。参数pData指向将要发送数据的地址,len为发送数据的长度。

首先判断len是否大于udp8080_qlen,如果是,则利用pbuf_alloc重新分配空间给pbuf udp8080_q,pbuf_alloc的参数为枚举类型,大家可以利用F3了解有哪些枚举成员。之后将数据拷贝到udp8080_q的payload,并给len和tot_len赋值。利用udp_sendto启动发送数据。
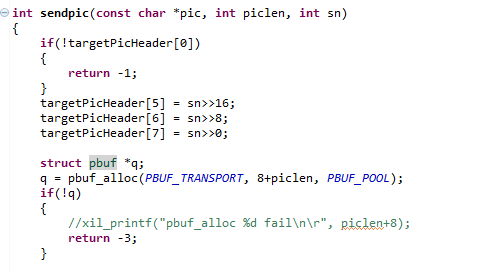
命令的接收及发送部分已经讲完,下面来了解如何发送图像数据。在echo.c中利用sendpic发送图像,与transfer_data函数操作类似,但由于图像数据每包数据有可能不同,因此每次都会释放pbuf,而且加入了图像的头targetPicHeader。
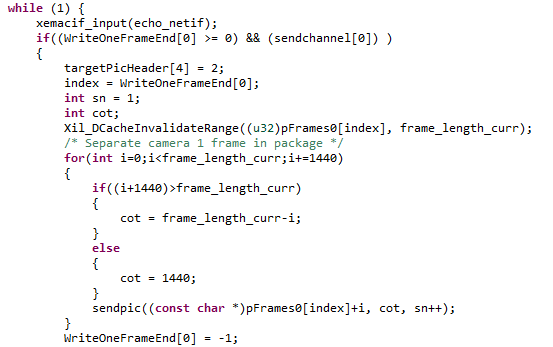
回到lwip_app.c文件,仍然是lwip_loop函数,此处有个while循环,利用xemacif_input启动数据的接收,在这里用到了与图像的交互变量WriteOneFrameEnd,如果接收到图像并且sendchannel[0]有效,开始分包,调用sendpic发送图像。下面的if为判断第二个摄像头是否有效。至此,完成了图像数据的发送。
板上验证#
在进行验证之前,首先要确保双目摄像头的HDMI显示没有问题,否则无法进行此实验。
连接开发板如下,插入PS端网口,需要保证PC的网卡是千兆网卡,否则会因为网络速度过低,导致无法显示图像。
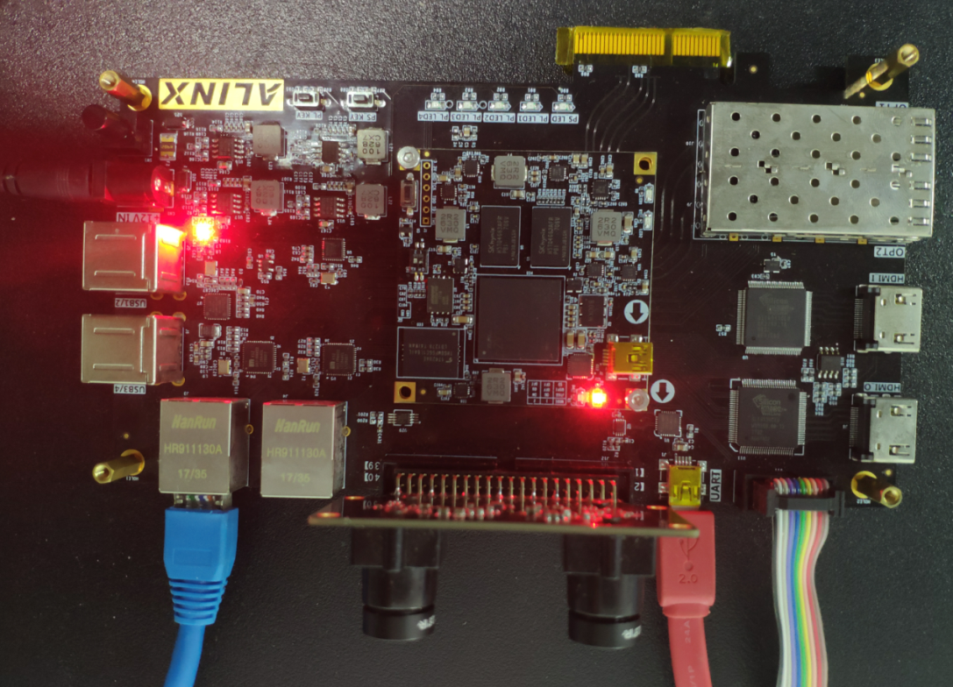
AX7015硬件连接图
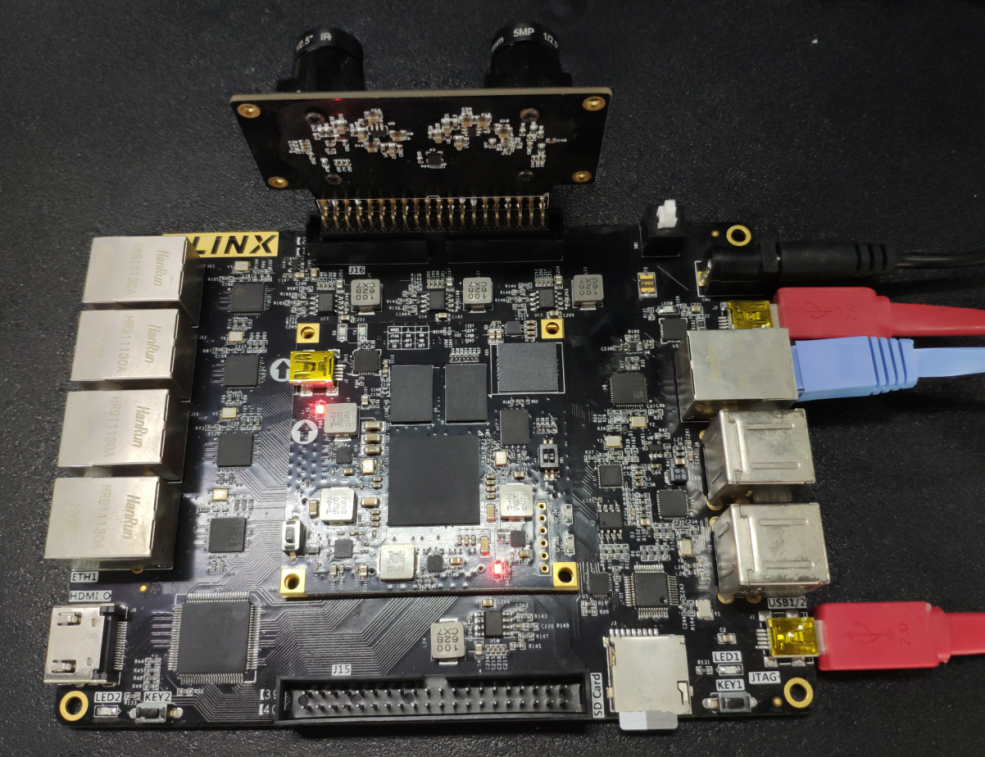
AX7021硬件连接图(J16扩展口)
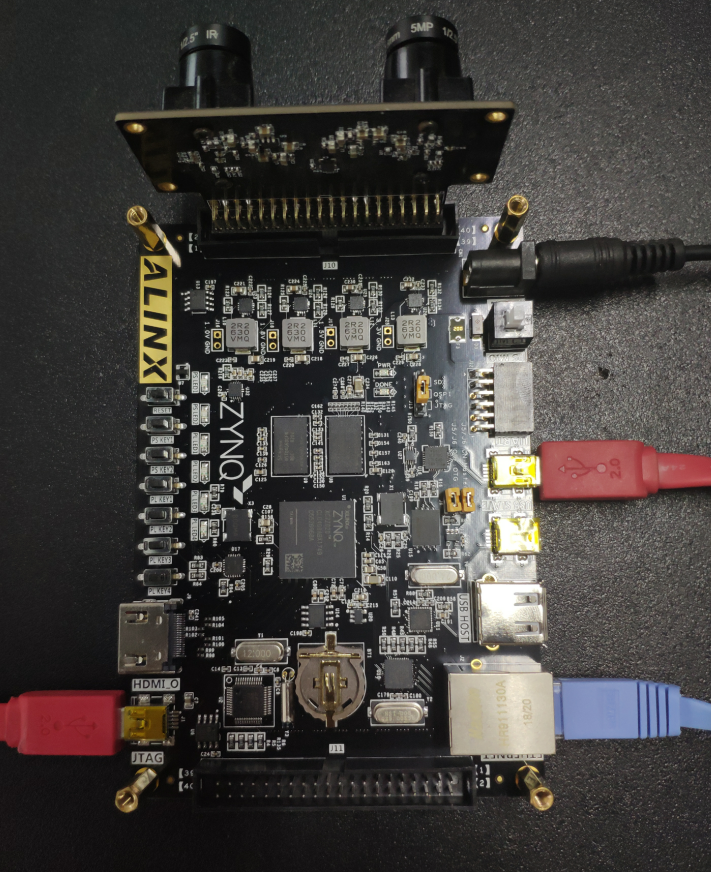
AX7020/AX7010硬件连接图(J10扩展口)
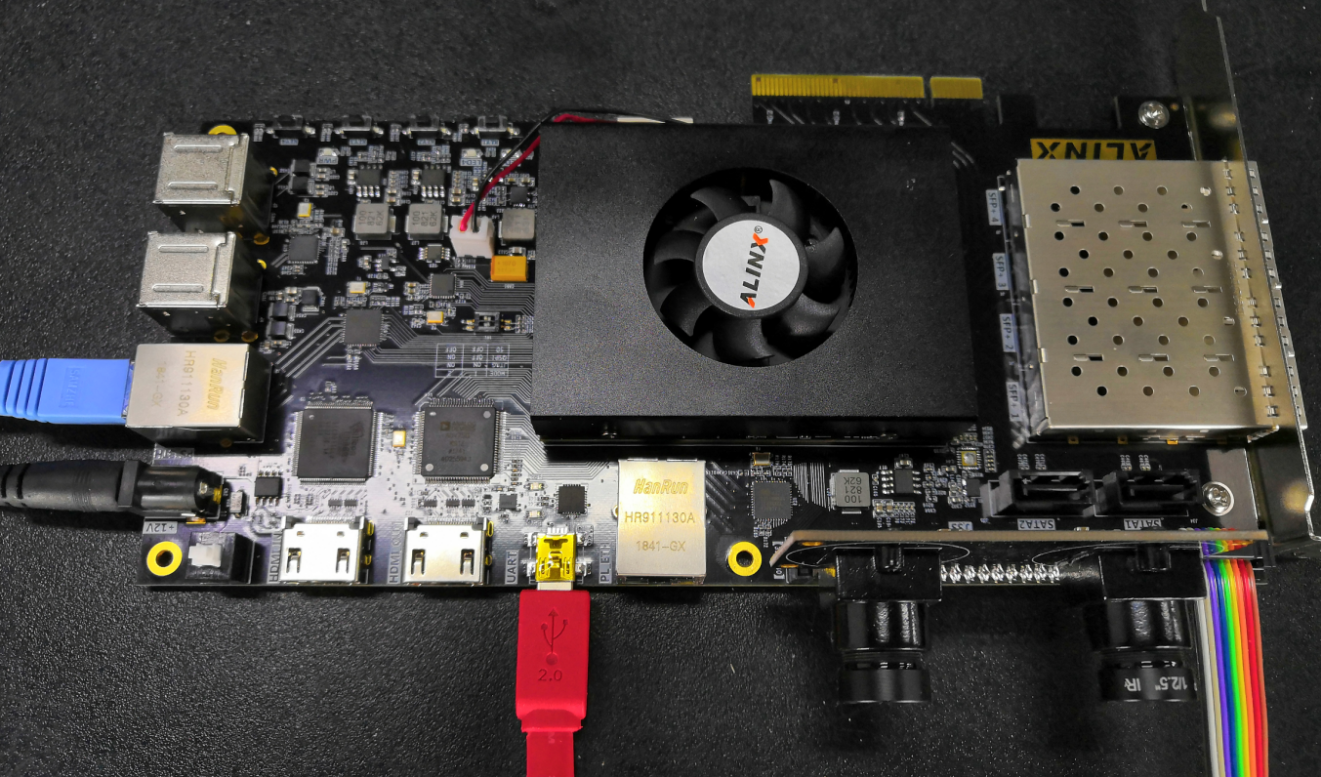
AX7Z035/AX7Z100硬件连接图
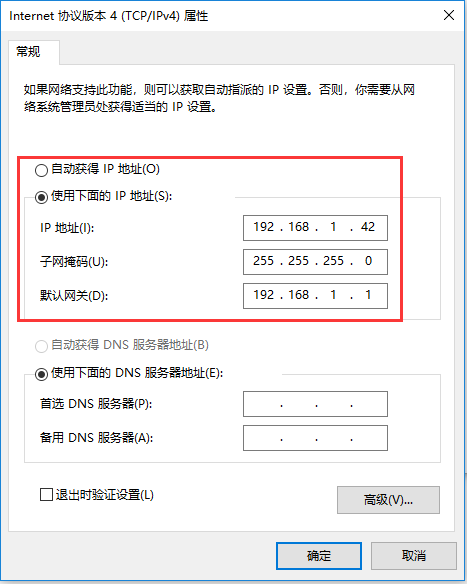
3. 如果有DHCP服务器,会自动分配IP给开发板;如果没有DHCP服务器,默认开发板IP地址为192.168.1.11,需要将PC的IP地址设为同一网段,如下图所示。同时要确保网络里没有192.168.1.11的IP地址,否则会造成IP冲突,导致无法显示图像。可以在板子未上电前在CMD里输入ping 192.168.1.11查看是否能ping通,如果ping通,说明网络中有此IP地址,就无法验证。没有问题之后打开putty软件。
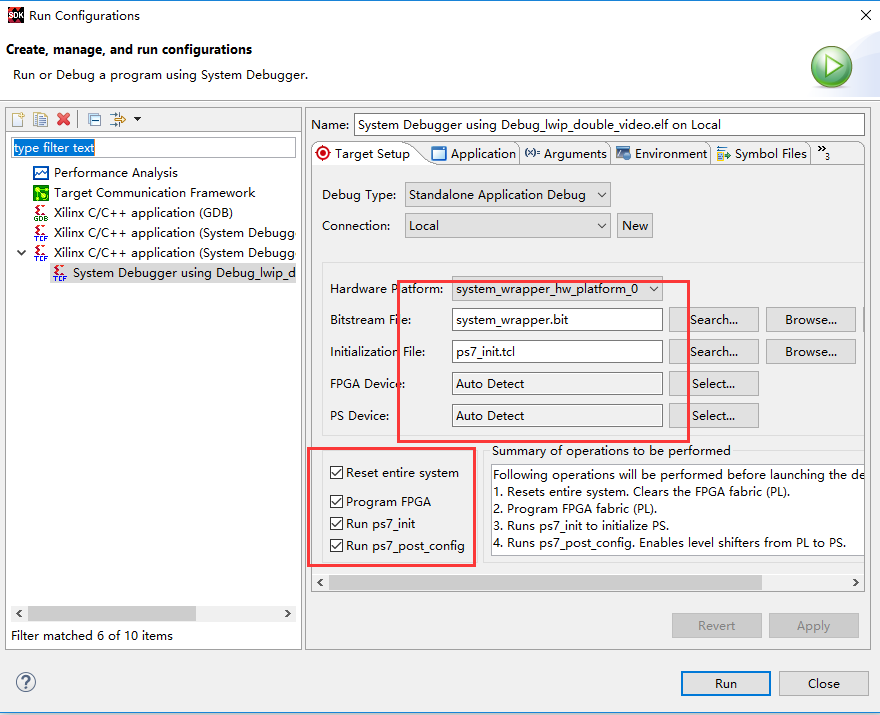
Run Configurations配置如下:
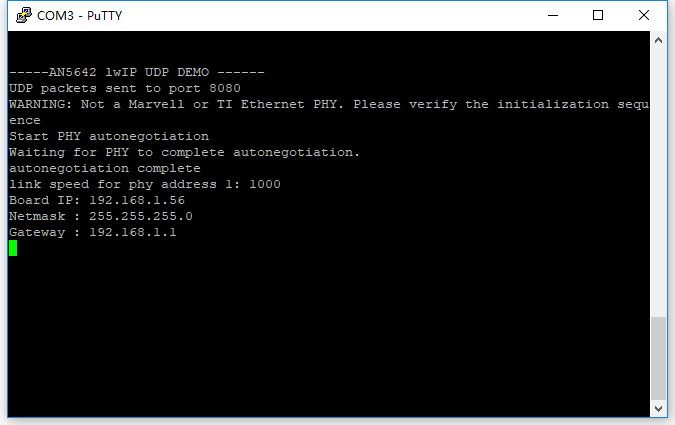
串口打印信息如下,检测出网卡速度,设置的IP地址
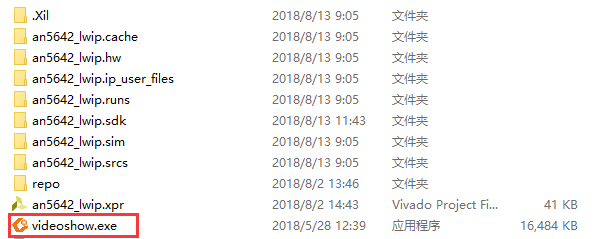
打开Vivado工程文件夹,打开videoshow.exe
软件扫描到两个摄像头,可通过勾选来选择相应的摄像头显示,点击播放
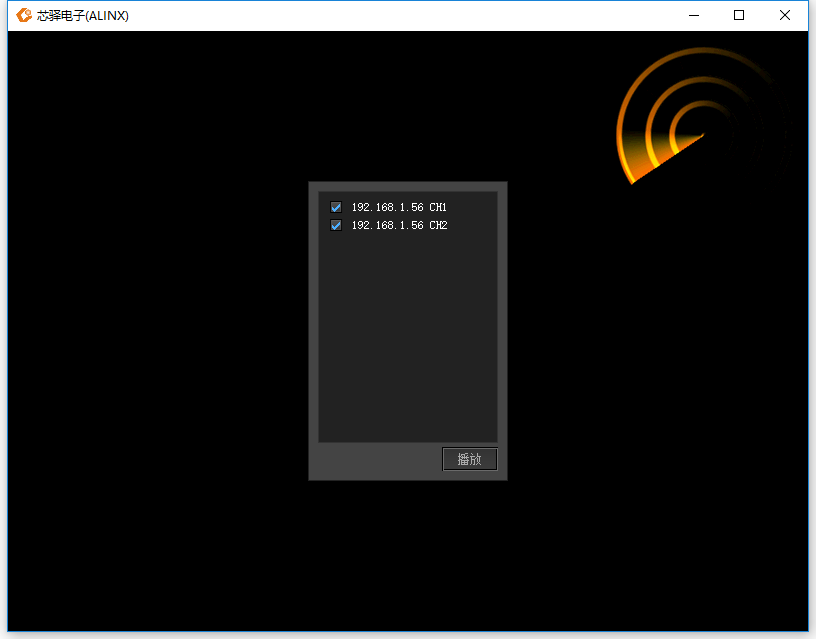
显示效果如下,如果想重新选择显示通路,在软件屏幕上双击,回到选择界面,再次选择要显示的图像。

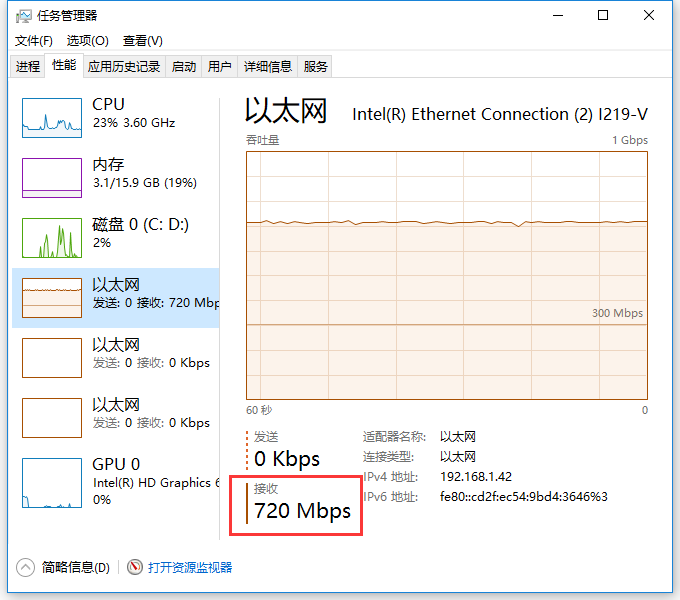
打开任务管理器,可以看到网络带宽为720Mbps左右
本章小结#
在本实验中,介绍了利用lwip的udp传输视频,内容较多,在此抛砖引玉,想熟练运用lwip并非一朝一夕之事,仍需大家深入研究内部结构,灵活运用。