
双目摄像头模块OpenCV显示#
例程相关文件夹:opencv_an5642
Vivado工程在vivado.zip压缩包中:opencv_an5642
前面的教程中讲到如何使用OpenCV和QT显示USB摄像头的应用,本章讲解如何显示芯驿电子配套模块双目摄像头(AN5642)的应用。
例程资料中给出了vivado工程,BSP包。
vivado工程简介#
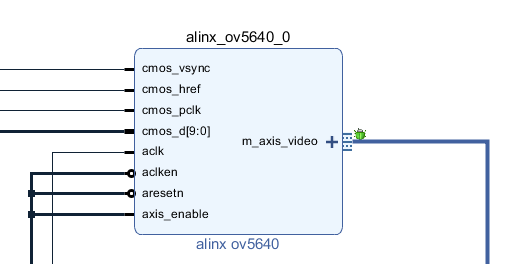
摄像头输入转换为AXI Stream模块,将摄像头输入数据转换为16bit的AXI Stream,然后通过VDMA写入PS端DDR3。
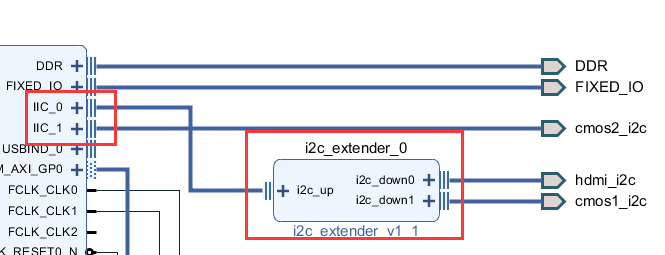
IIC处理,由于双目OV5640的IIC地址完全相同,所以这里使能2路IIC,都是通过EMIO引出到PL端,其中一个通过IIC扩展模块扩展出多路。
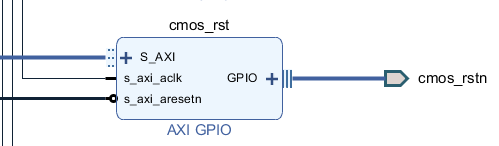
通过AXI GPIO复位2路摄像头
摄像头驱动#
芯驿电子为OV5640写了简单的驱动,由于Linux驱动编写涉及内容较多,大部分驱动编写都是通过改写内核中已有驱动,这个驱动也是一样。驱动主要配置OV5640输出YUV422数据,分辨率根据应用程序来修改,驱动不做过多解释,本身就是Linux开发中比较难的点,请直接使用芯驿电子提供的Linux内核源码包。
内核驱动配置#
内核驱动中涉及到drm显示的部分请参考第八章HDMI显示的内核配置,可以在HDMI显示的工程基础上添加下列配置,也可以用BSP包重新生成工程。
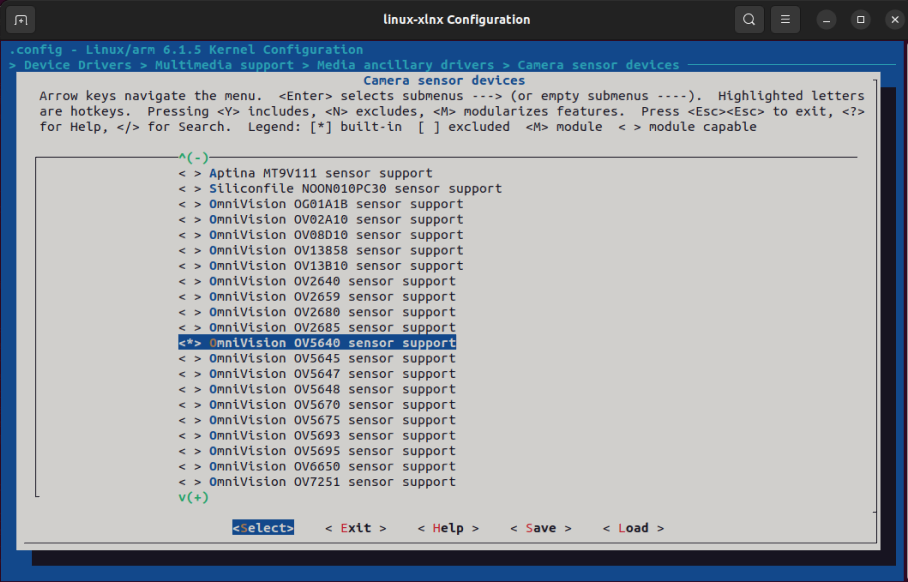
驱动配置,Device Drivers → Multimedia support→ Media ancillary drivers → Camera sensor devices→ <*> ALINX OV5640 sensor support,HDMI等显示驱动配置在前面的教程中已经讲解,不再复述。
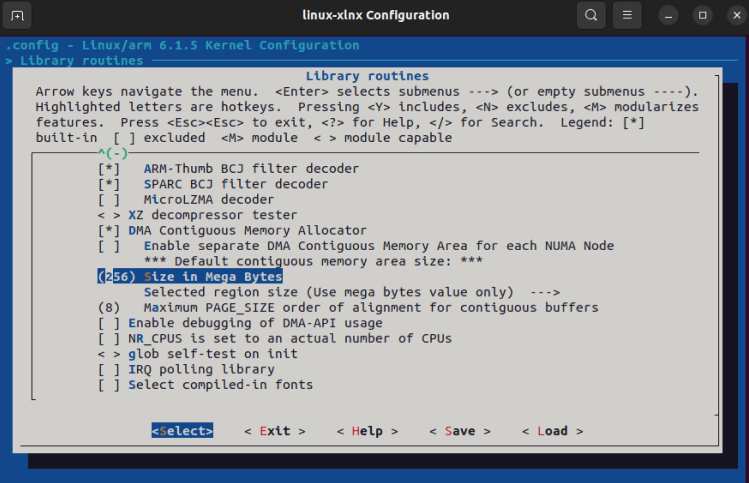
Library routines →Size in Mega Bytes ,CMA_SIZE_MBYTES配置,由于视频路数增加,需要添加更多的DMA空间,配置CMA_SIZE_MBYTES大小为256MB
设备树配置#
在petalinux工程project-spec/meta-user/recipes-bsp/device-tree/files目录下,找到system-user.dtsi,这是我们要修改会添加的设备树,例程中已经修改好
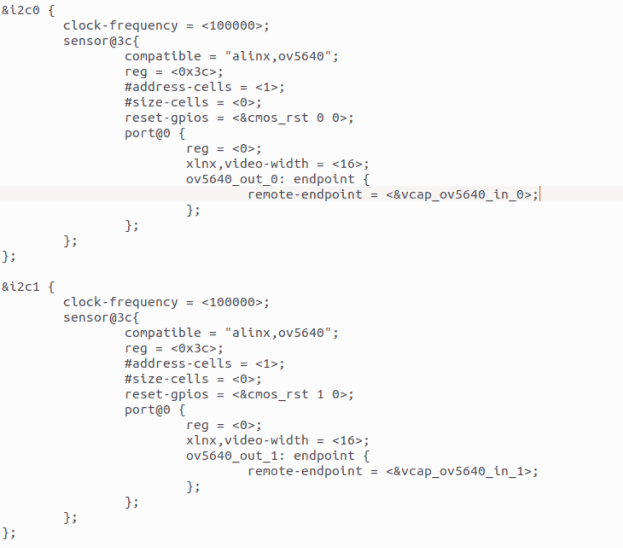
2个OV5640分别挂载i2c0和i2c1总线下,地址为0x3c(7bit表示,是8bit表示地址的一半),详细设备树可以参考例程petalinux工程目录下project-spec/meta-user/recipes-bsp/device-tree/files/system-user.dtsi文件
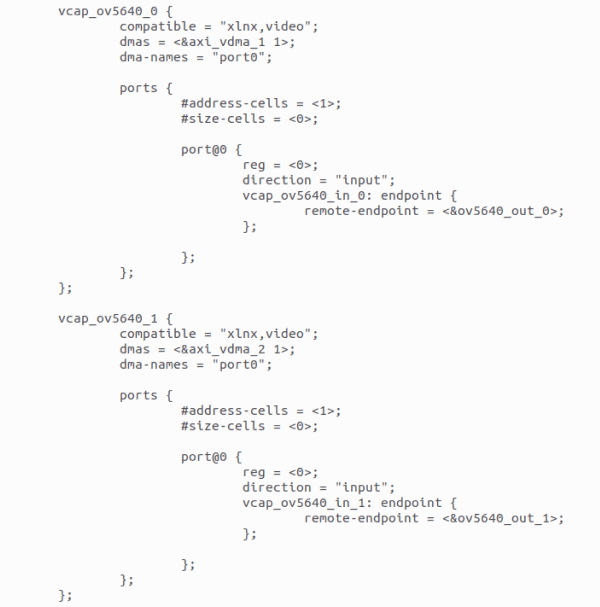
vcap_ov5640设备为Xilinx提供VDMA驱动封装起来,做成V4L2接口
摄像头Linux应用程序#
应用程序使用QT编写,结合OpenCV做颜色空间转换,在前面的教程中已经将过,不再复述
需要注意的是,elf文件生成位置,和前面教程不同,这次在app目录里
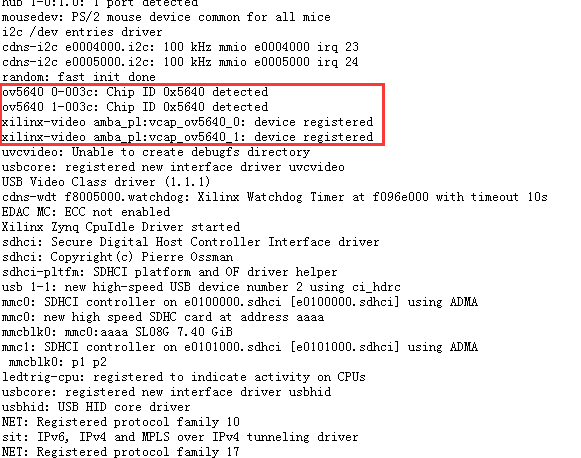
运行例程Linux,可以看到双目摄像头相关驱动打印信息。
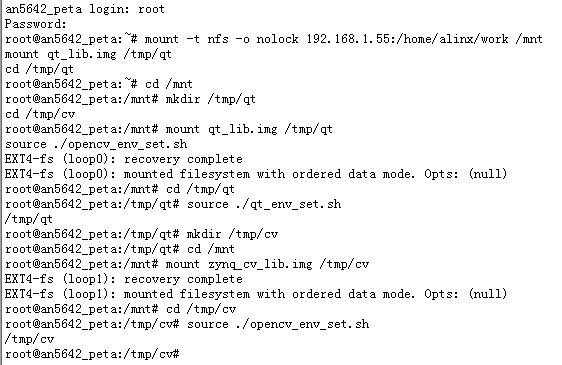
挂载NFS,设置QT和OpenCV运行环境
mount -t nfs -o nolock 192.168.1.115:/home/alinx2020/work /mnt cd /mnt mkdir /tmp/qt mount qt_lib.img /tmp/qt cd /tmp/qt source ./qt_env_set.sh mkdir /tmp/cv cd /mnt mount zynq_cv_lib.img /tmp/cv cd /tmp/cv source ./opencv_env_set.sh |
运行测试程序
cd /mnt/app ./an5642_demo |

运行效果,资料包中给出了编译好的程序在sd_boot目录,所有文件复制到sd卡根目录运行即可。

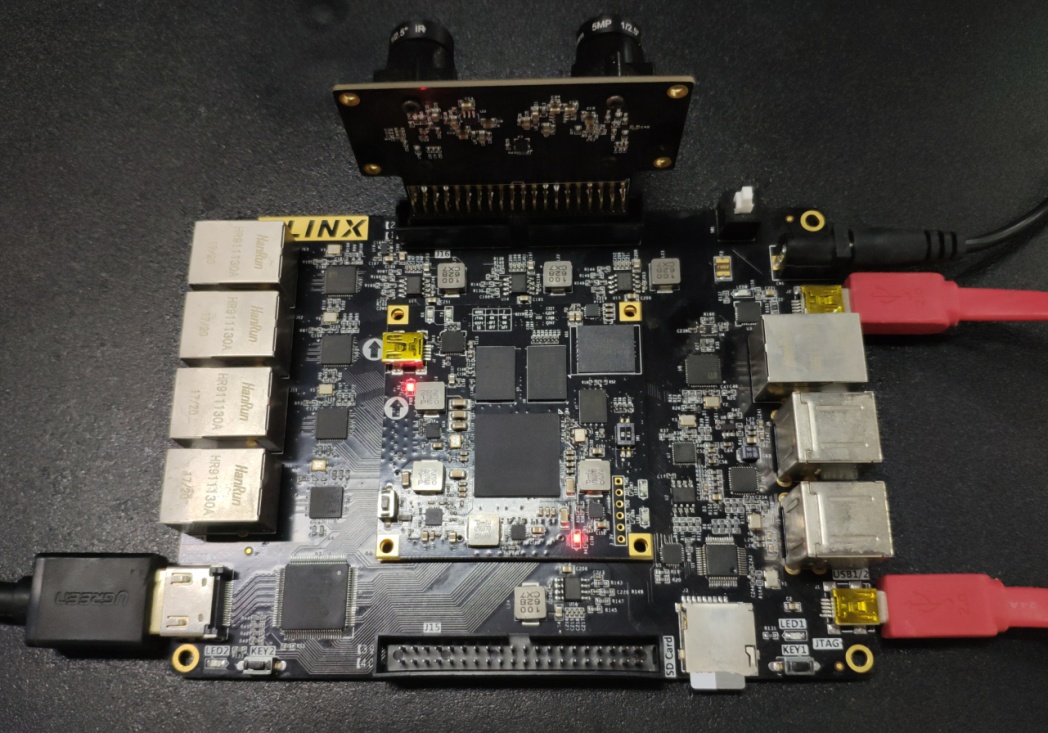
AX7021硬件连接图(J16扩展口)
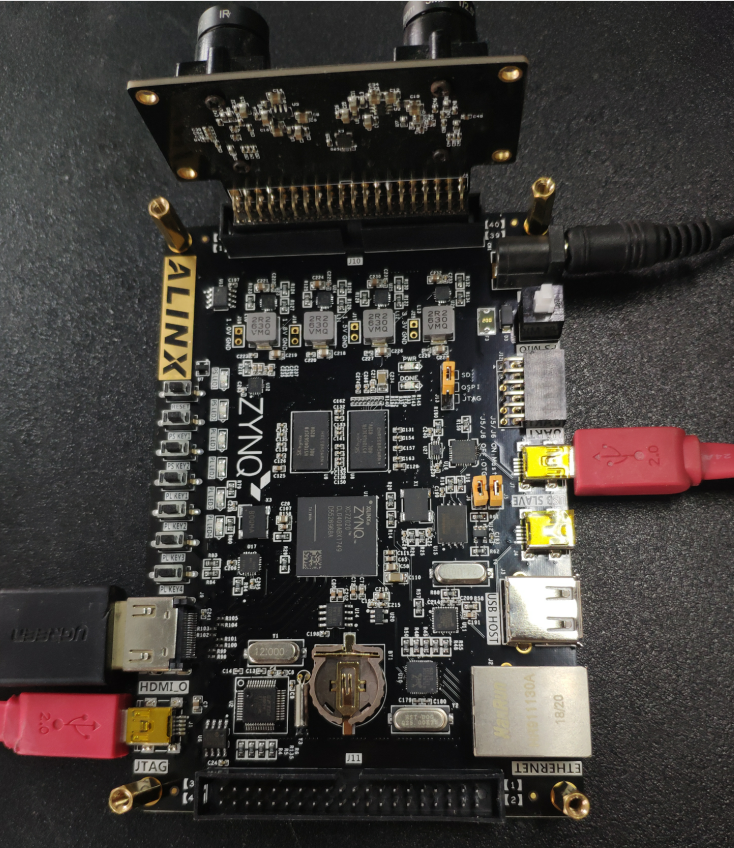
AX7020/AX7010硬件连接图(J10扩展口)