
Petalinux下的HDMI显示#
实验Vivado工程为“linux_base” ,在vivado.zip压缩包中。
实验petalinux工程相关文件夹为“ax_peta_hdmi”
前面的教程中我们已经体验了使用Petalinux开发嵌入式Linux系统,但我们使用的功能仅仅是Petalinux冰山一角,Petalinux的强大功能需要我们不断的探索,本实验讲解如何使用一个自己的内核来做Linux,这样我们可以在内核里添加很多驱动,例如HDMI显示。
开发板使用的没有HDMI接口芯片,但是使用了PFGA去完成编码,芯驿电子将Xilinx提供的内核中加入了HDMI编码IP的驱动。请使用其他版本软件开发者注意,本教程只提供修改版linux-xlnx-xlnx_rebase_v6.1_LTS内核,不提供其他版本修改版,也不提供修改说明。
Petalinux配置#
本实验还是在前面实验的Petalinux工程修改,需要先掌握前面的实验内容。
打开终端,设置petalinux环境变量,运行下面命令
source /opt/pkg/petalinux/settings.sh |
运行下面命令设置vivado环境变量
source /tools/Xilinx/Vivado/2023.1/settings64.sh |
将资料中第八章HDMI显示的bsp包复制到虚拟机里,运行命令,用bsp生成PetaLinux工程
petalinux-create -t project -n ax_peta -s ./hdmi.bsp |

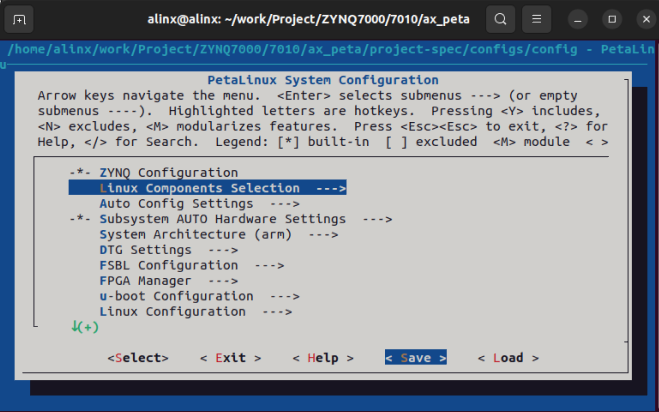
控制台进入新生成的ax_peta目录,使用下面命令配置petalinux内核来源以及离线编译,具体配置过程参考第五章的5.2和5.3,由于这里我们用的是bsp包,所以这些内容都已经配置好了,如果用户是用xsa文件生成的PetaLinux工程,就需要重新配置这些项。
petalinux-config |

然后保存退出
配置Linux内核#
运行下面的命令配置内核
petalinux-config -c kernel |
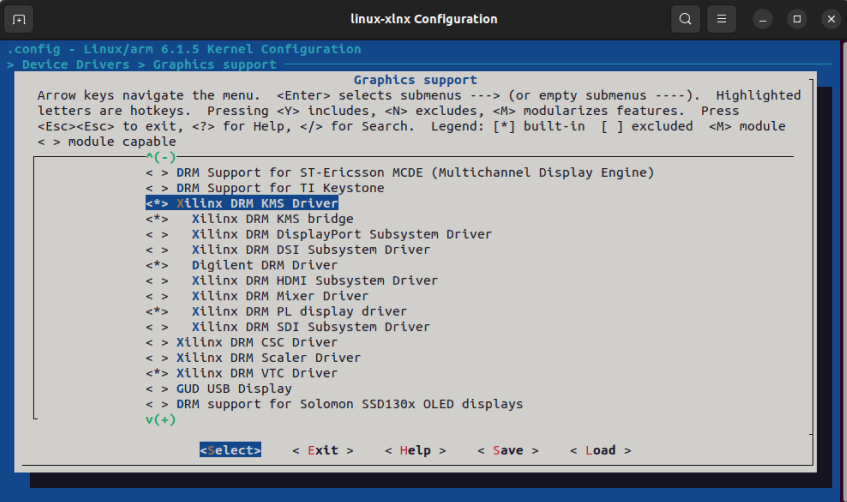
在弹出的窗口中,进入Device Drivers → Graphics support,分别选择以下5项
Xilinx DRM KMS Driver
Xilinx DRM KMS bridge
Digilent DRM Driver
Xilinx DRM PL display driver
Xilinx DRM VTC Driver
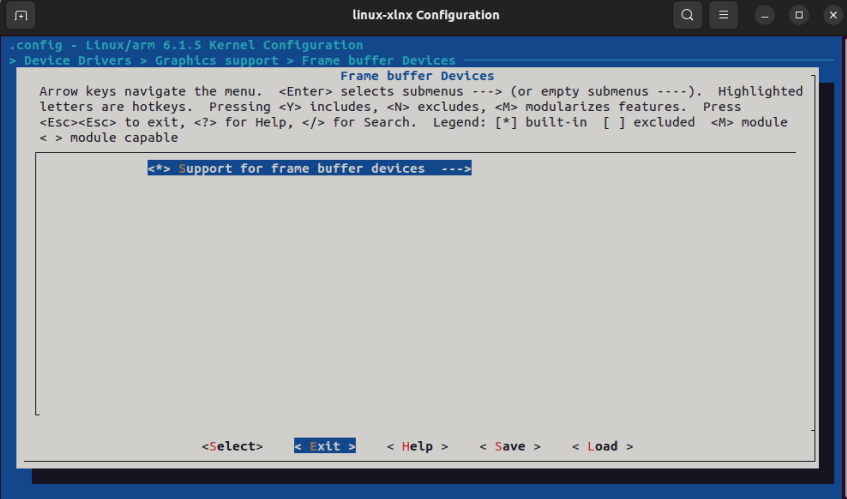
在Device Drivers → Graphics support → Frame buffer Devices中选择Support for frame buffer devices按y
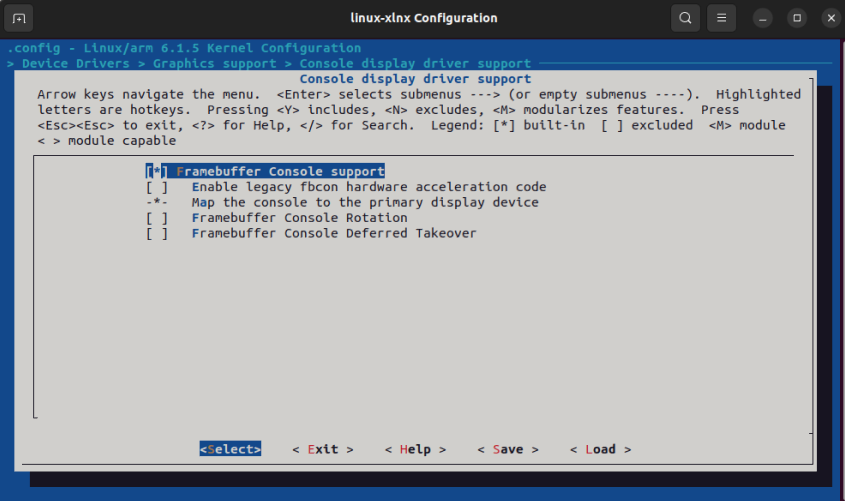
在Device Drivers → Graphics support →Console display driver support选项中选择Framebuffer Console support按y
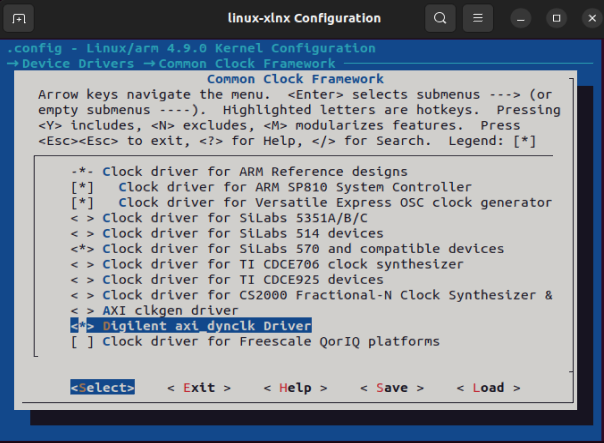
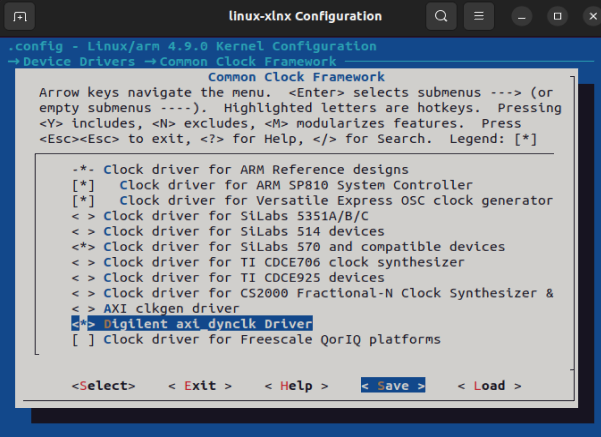
在Device Drivers → Common Clock Framework选项中选择Digilent axi_dynclk Driver按y
保存并退出
修改设备树#
设备树是描述设备信息的一种格式化文本,这种文本结构对类似于XML和JSON, 什么?XML和JSON也不会?如果这些基础配置数据格式都没接触过学习设备树是要很长时间摸索的。每个驱动要求的设备树节点也是不同的,对于没接触过设备的开发人员,需要慢慢熟悉,在一次一次的使用种慢慢掌握。
打开petalinux工程文件中的名为system-user.dtsi的文件
修改设备树内容如下
/include/ “system-conf.dtsi” / { model = “Zynq ALINX Development Board”; compatible = “alinx,zynq”, “xlnx,zynq-7000”; aliases { ethernet0 = “&gem0”; serial0 = “&uart1”; }; usb_phy0: usb_phy@0 { compatible = “ulpi-phy”; #phy-cells = <0>; reg = <0xe0002000 0x1000>; view-port = <0x0170>; drv-vbus; }; }; &i2c0 { clock-frequency = <100000>; }; &usb0 { dr_mode = “host”; usb-phy = <&usb_phy0>; }; &sdhci0 { u-boot,dm-pre-reloc; }; &uart1 { u-boot,dm-pre-reloc; }; &flash0 { compatible = “micron,m25p80”, “w25q256”, “spi-flash”; }; &gem0 { phy-handle = <ðernet_phy>; ethernet_phy: ethernet-phy@1 { reg = <1>; device_type = “ethernet-phy”; }; }; &amba_pl { digilent_hdmi { compatible = “digilent,hdmi”; clocks = <&axi_dynclk_0>; clock-names = “clk”; digilent,edid-i2c = <&i2c0>; digilent,fmax = <150000>; port@0 { #address-cells = <1>; #size-cells = <0>; hdmi_ep: endpoint { remote-endpoint = <&pl_disp_ep>; }; }; }; xlnx_pl_disp { compatible = “xlnx,pl-disp”; dmas = <&axi_vdma_0 0>; dma-names = “dma0”; xlnx,vformat = “RG24”; xlnx,bridge = <&v_tc_0>; port@0 { reg = <0>; pl_disp_ep: endpoint { remote-endpoint = <&hdmi_ep>; }; }; }; }; &axi_dynclk_0 { compatible = “dglnt,axi-dynclk”; #clock-cells = <0>; clocks = <&clkc 15>; }; &v_tc_0 { compatible = “xlnx,bridge-v-tc-6.1”; xlnx,pixels-per-clock = <1>; }; |
编译测试Petalinux工程#
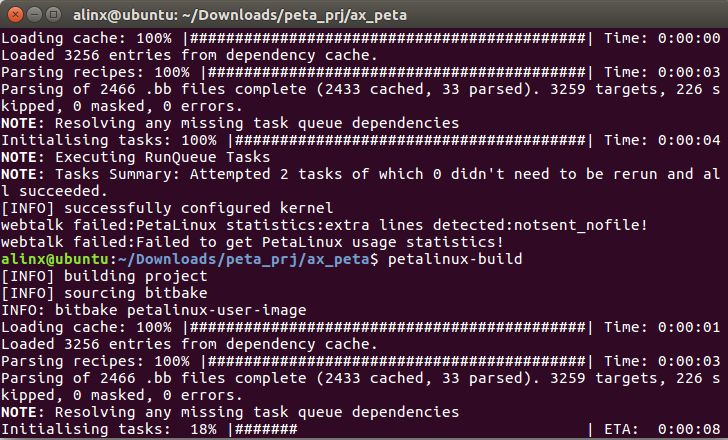
使用下面命令配置编译uboot、内核、根文件系统、设备树等。
petalinux-build |
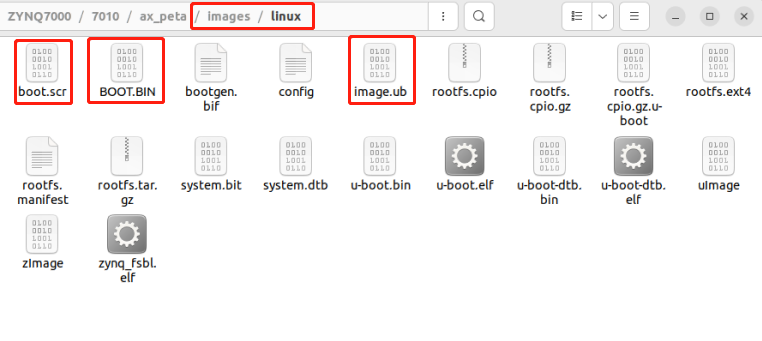
运行下面命令生成BOOT文件,注意空格和短线
petalinux-package –boot –fsbl ./images/linux/zynq_fsbl.elf –fpga –u-boot –force |
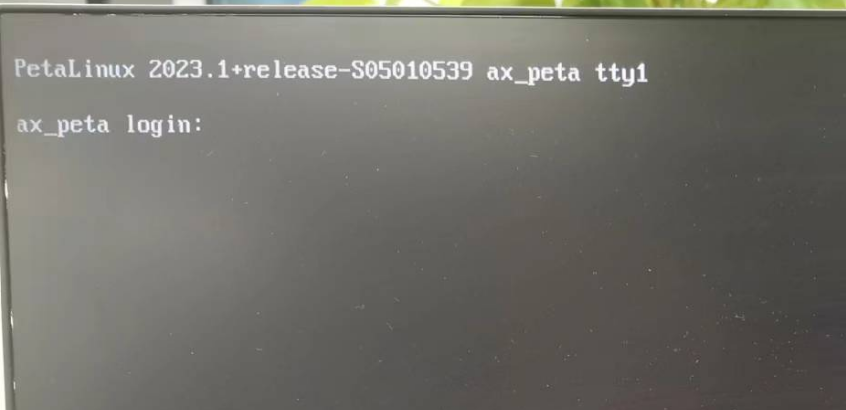
把BOOT.bin,iamge.ub和boot.scr复制到sd中,设置开发板sd模式启动,插上HDMI显示器,启动开发板。
显示器会显示出如下内容
常见问题#
如何防止系统休眠#
休眠之前运行命令
echo -e “ \033[9;0]\033[?33l\033[?25h\033[?1c” > /dev/tty0
echo -e “ \033[9;0]\033[?33l\033[?25h\033[?1c” > /dev/tty1
echo -e “ \033[9;0]\033[?33l\033[?25h\033[?1c” > /dev/tty
echo -e “ \033[9;0]\033[?33l\033[?25h\033[?1c” > /dev/console