
I2C驱动#
I2C是常用的串行接口总线,Linux内核中也提供了完善的I2C驱动框架。本章就来了解一下Linux内核中提供的I2C驱动框架。
I2C驱动框架#
在platform驱动框架和pwm驱动框架中,都提到过驱动的分离,也就是控制器或总线和设备的分离。I2C也是相似的结构,分为I2C总线和I2C设备。总线是芯片本身的I2C资源,而设备则是I2C外接的用户设备如RTC、EEPROM等。我们分别来看他们的实现方法。
I2C控制器驱动#
内核中使用结构体i2c_adapter来表示I2C控制器,i2c_adapter结构体定义在文件include/linux/i2c.h中。如下:
struct i2c_adapter {
struct module *owner;
unsigned int class; /* classes to allow probing for */
const struct i2c_algorithm *algo; /* the algorithm to access the bus */
void *algo_data;
/* data fields that are valid for all devices */
const struct i2c_lock_operations *lock_ops;
struct rt_mutex bus_lock;
struct rt_mutex mux_lock;
int timeout; /* in jiffies */
int retries;
struct device dev; /* the adapter device */
int nr;
char name[48];
struct completion dev_released;
struct mutex userspace_clients_lock;
struct list_head userspace_clients;
struct i2c_bus_recovery_info *bus_recovery_info;
const struct i2c_adapter_quirks *quirks;
};
549行的const struct i2c_algorithm型指针成员变量algo,是I2C设备访问总线的接口函数的合集,是I2C设备和I2C控制器通讯的方法。
i2c_algorithm结构体定义如下:
struct i2c_algorithm {
/* If an adapter algorithm can't do I2C-level access, set master_xfer
to NULL. If an adapter algorithm can do SMBus access, set
smbus_xfer. If set to NULL, the SMBus protocol is simulated
using common I2C messages */
/* master_xfer should return the number of messages successfully
processed, or a negative value on error */
int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs,
int num);
int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr,
unsigned short flags, char read_write,
u8 command, int size, union i2c_smbus_data *data);
/* To determine what the adapter supports */
u32 (*functionality) (struct i2c_adapter *);
#if IS_ENABLED(CONFIG_I2C_SLAVE)
int (*reg_slave)(struct i2c_client *client);
int (*unreg_slave)(struct i2c_client *client);
#endif
414行的master_xfer函数就是用于与I2C设备通讯的函数。
416行的smbus_xfer函数是smbus的传输函数。
I2C总线驱动的实现首先要定义并初始化一个i2c_adapter结构体型的变量,初始化包括实现i2c_algorithm中的函数,至少要实现master_xfer函数。
初始化完成后,使用下面的函数向内核注册i2c_algorithm:
int i2c_add_adapter(struct i2c_adapter *adapter) int i2c_add_numbered_adapter(struct i2c_adapter *adap) |
这两个函数的却别的前者使用动态总线号,后者使用静态总线号。输入参数为初始化后的i2c_add_adapter结构体变量。返回0注册成功,返回负值注册失败。
相对的注销函数为:
void i2c_del_adapter(struct i2c_adapter * adap) |
输入参数adap为需要删除的I2C控制器。
I2C控制器的驱动一般由芯片厂家提供,从设备树中找到I2C控制器的节点,可以发现节点中的compatible属性为cdns,i2c-r1p10,通过这个compatible可以追寻到,使用的I2C控制器驱动为drivers\i2c\busses\i2c-cadence.c。I2C控制器的驱动相关暂且了解这么多,把重点放在I2C的设备驱动中去。
I2C设备驱动#
设备驱动又分层为两个部分,设备i2c_client和驱动i2c_driver。
i2c_client
i2c_client用于描述设备信息,定义如下:
struct i2c_client {
unsigned short flags; /* div., see below */
unsigned short addr; /* chip address - NOTE: 7bit */
/* addresses are stored in the */
/* _LOWER_ 7 bits */
char name[I2C_NAME_SIZE];
struct i2c_adapter *adapter; /* the adapter we sit on */
struct device dev; /* the device structure */
int irq; /* irq issued by device */
struct list_head detected;
#if IS_ENABLED(CONFIG_I2C_SLAVE)
i2c_slave_cb_t slave_cb; /* callback for slave mode */
#endif
};
230行的addr表示芯片地址,储存在低7位。
233行的name表示设备名称。
234行的adapter位设备对应I2C控制器。
每一个I2C设备对应一个i2c_client。
i2c_driver
i2c_driver是Linux框架中I2C处理的重点,定义如下:
struct i2c_driver {
unsigned int class;
/* Notifies the driver that a new bus has appeared. You should avoid
* using this, it will be removed in a near future.
*/
int (*attach_adapter)(struct i2c_adapter *) __deprecated;
/* Standard driver model interfaces */
int (*probe)(struct i2c_client *, const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
/* driver model interfaces that don't relate to enumeration */
void (*shutdown)(struct i2c_client *);
/* Alert callback, for example for the SMBus alert protocol.
* The format and meaning of the data value depends on the protocol.
* For the SMBus alert protocol, there is a single bit of data passed
* as the alert response's low bit ("event flag").
* For the SMBus Host Notify protocol, the data corresponds to the
* 16-bit payload data reported by the slave device acting as master.
*/
void (*alert)(struct i2c_client *, enum i2c_alert_protocol protocol,
unsigned int data);
/* a ioctl like command that can be used to perform specific functions
* with the device.
*/
int (*command)(struct i2c_client *client, unsigned int cmd, void *arg);
struct device_driver driver;
const struct i2c_device_id *id_table;
/* Device detection callback for automatic device creation */
int (*detect)(struct i2c_client *, struct i2c_board_info *);
const unsigned short *address_list;
struct list_head clients;
};
178行的probe函数和platform框架中的类似,I2C设备和驱动匹配成功后就会执行。
199行的device_driver结构体变量driver就是用于和设备匹配,和platform框架类似,使用设备树的话,需要设置driver.of_match_table中的compatible属性。
200行的id_table和platform框架类似,未使用设备树时使用这个匹配表。
定义并初始化完成i2c_driver之后使用下面的函数来向内核注册:
int i2c_register_driver(struct module *owner, struct i2c_driver *driver) |
owner一般位THIS_MODULE。
driver就是需要注册的i2c_driver。
返回0成功,负值失败。
相对的注销函数为:
void i2c_del_driver(struct i2c_driver *driver) |
I2C设备驱动编写示例:
static int ax_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
return 0;
}
static int ax_remove(struct i2c_client *client)
{
return 0;
}
static const struct of_device_id ax_of_match[] =
{
{ .compatible = "alinx-xxx"},
{/* sentinel */}
};
static struct i2c_driver ax_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "alinx-xxx",
.of_match_table = ax_of_match,
},
.probe = ax_probe,
.remove = ax_remove,
};
static int ax_init(void)
{
i2c_add_driver(&ax_driver);
return 0;
}
static void ax_exit(void)
{
i2c_del_driver(&ax_driver);
}
module_init(ax_init);
module_exit(ax_exit);
I2C设备驱动的实现流程#
设备树
首先要在对应的I2C节点中添加设备节点,如下:
i2c0: i2c@e0004000 {
compatible = "cdns,i2c-r1p10";
clocks = <&clkc 38>;
interrupt-parent = <&intc>;
interrupts = <0 25 4>;
reg = <0xe0004000 0x1000>;
#address-cells = <1>;
#size-cells = <0>;
};
……
&i2c0 {
axrtc@68 {
compatible = "alinx-rtc";
status = "okay";
reg = <0x68>;
};
};
第一行的i2c0是控制器的节点。第11行引用控制器节点&i2c,并在里面添加设备节点axrtc。
设备节点名称后面@接的是设备的地址68。设备节点的关键属性有两个。compatible兼容性用于和设备驱动相匹配。reg和节点名@后面的值相同,都是设备地址。
设备树配置好后就可以仔probe函数中获取设备地址。
数据收发
I2C的手法通过内核中的i2c_transfer函数实现,这个函数最终会调用i2c控制器驱动中的master_xfer函数。
i2c_transfer函数定义在include/linux/i2c.h中,原型如下:
int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num) |
参数adap可以在probe函数中获取,probe函数被调用时,第一个输入参数为设备树中对应节点的struct i2c_client *client,client中的adap也就是对应的控制器。
参数msgs是需要发送的数据。
参数num为需要发送msgs数量。
返回负值失败,返回非负值为msgs发送的数量。
msgs的为struct i2c_msg类型的指针,struct i2c_msg定义在include/uapi/linux/i2c.h中如下:
struct i2c_msg {
__u16 addr; /* slave address */
__u16 flags;
#define I2C_M_RD 0x0001 /* read data, from slave to master */
/* I2C_M_RD is guaranteed to be 0x0001! */
#define I2C_M_TEN 0x0010 /* this is a ten bit chip address */
#define I2C_M_RECV_LEN 0x0400 /* length will be first received byte */
#define I2C_M_NO_RD_ACK 0x0800 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_IGNORE_NAK 0x1000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_REV_DIR_ADDR 0x2000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_NOSTART 0x4000 /* if I2C_FUNC_NOSTART */
#define I2C_M_STOP 0x8000 /* if I2C_FUNC_PROTOCOL_MANGLING */
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};
根据flags的值,i2c_transfer函数执行不同的工作,包括读写。
调用i2c_transfer函数之前,需要先构建struct i2c_msg变量,如下:
static int ax_read_regs(struct axrtc_dev *dev, u8 reg, void *val, int len)
{
int ret;
struct i2c_msg msg[2];
struct i2c_client *client = (struct i2c_client *)dev->private_data;
msg[0].addr = client->addr;
msg[0].flags = 0;
msg[0].buf = ®
msg[0].len = 1;
msg[1].addr = client->addr;
msg[1].flags = I2C_M_RD;
msg[1].buf = val;
msg[1].len = len;
ret = i2c_transfer(client->adapter, msg, 2);
if(2 == ret)
{
ret = 0;
}
else
{
printk("i2c read failed %d", ret);
ret = -EREMOTEIO;
}
return ret;
}
第4行定义了struct i2c_msg类型的数组msg。
这里的client获取了dev->private_data中的值,dev->private_data是仔probe中设置的私有变量,具体到后面的实验中再去分析,先看msg的构造。
7~10行构建msg[0],addr为设备地址值,使用client中的addr即可。flags赋为0时为写。flags为写时buf的值为写入的数据的首地址。len为写入数据的长度。
12~15行构建msg[1],flag等于I2C_M_RD为读数据,此时buf为储存读出数据buffer的首地址。len为读出数据的长度。
实验#
本章的实验使用I2C来做一个开发板上的eeprom数据读写实验。主要目标是验证i2c框架的使用是否正确,先往eeprom中写入数据再读出,两次数据一致则成功。
原理图#
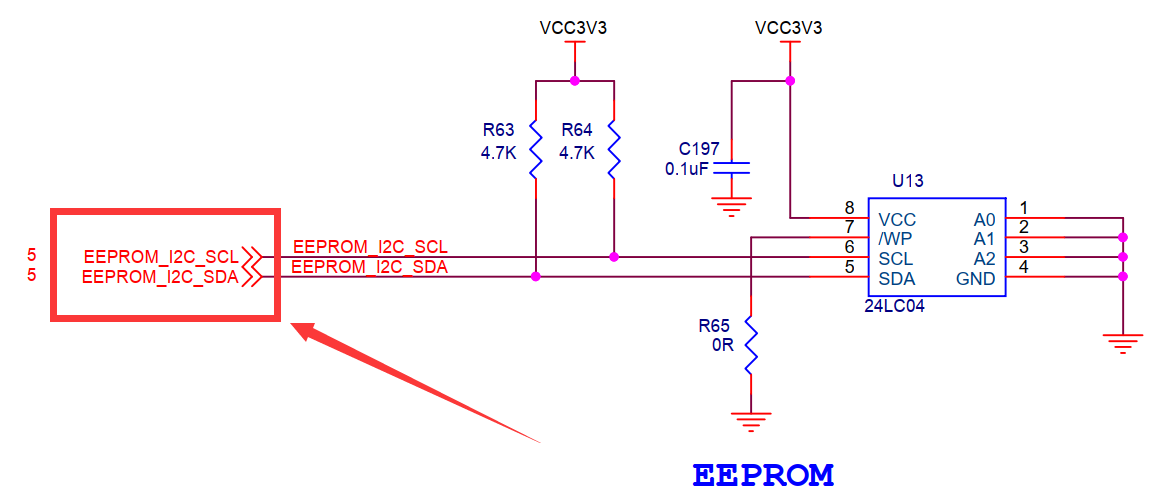
找到原理图中eeprom的位置,看看scl和sda两根线接在哪里。


分别接在pl端的T19引脚和U19引脚上。使用pl端的资源,需要借助vivado工具来配置。
打开之前使用的vivado工程。打开Diagram界面。
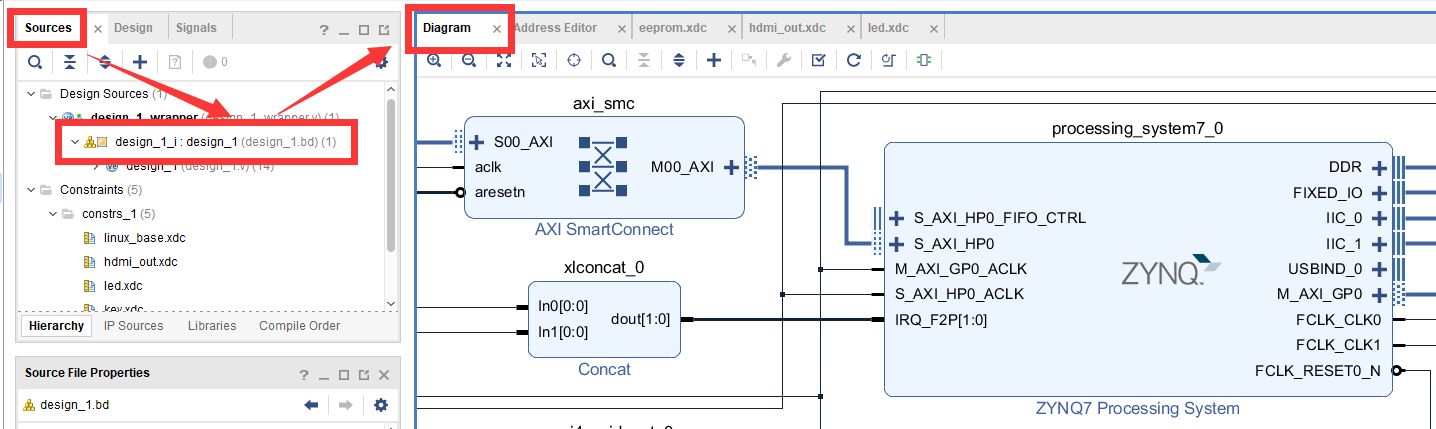
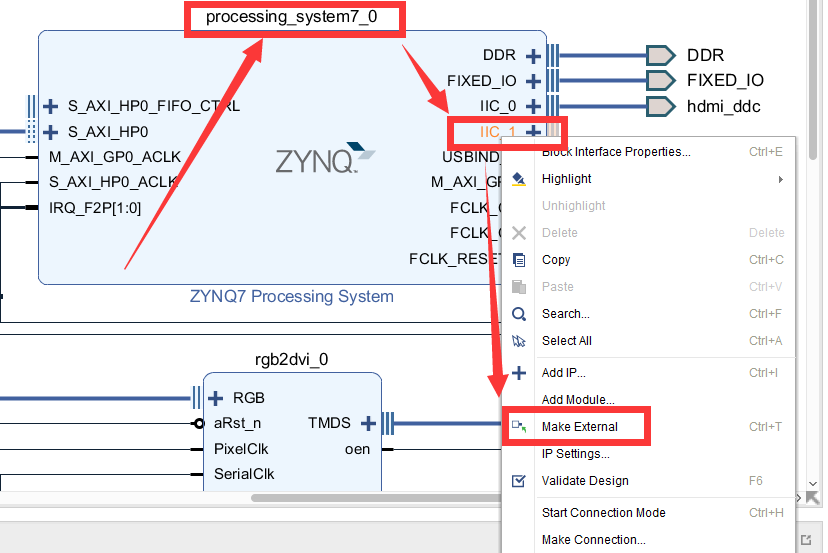
在processing_system7_0的IIC_1引脚上右击,选择Make External导出引脚。
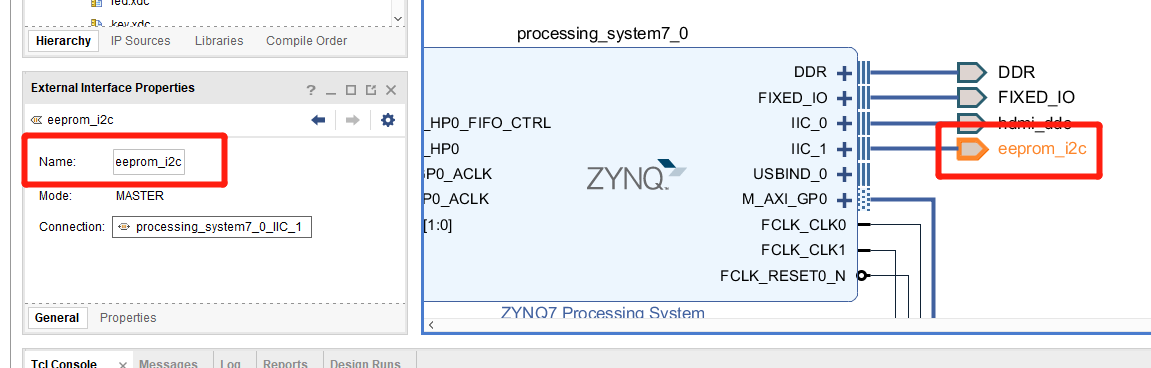
把到处的引脚改名为eeprom_i2c。
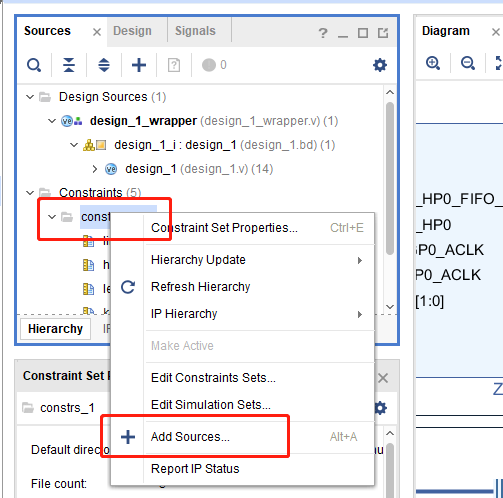
关键的一步,添加新的xdc约束管脚,使IIC_1导出的引脚与原理图上连接eeprom的引脚对应。在constrs_1上右击,选择Add Sources。
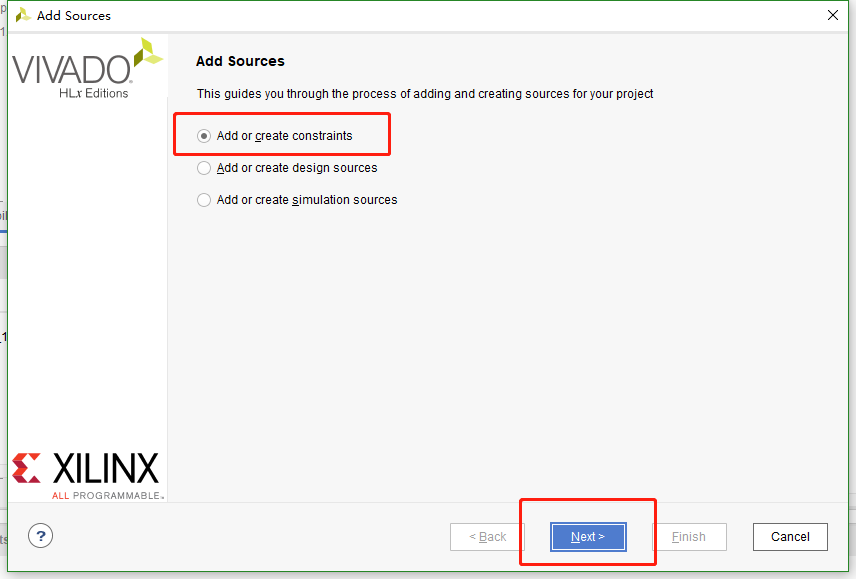
弹出的对话框中直接点击Next。
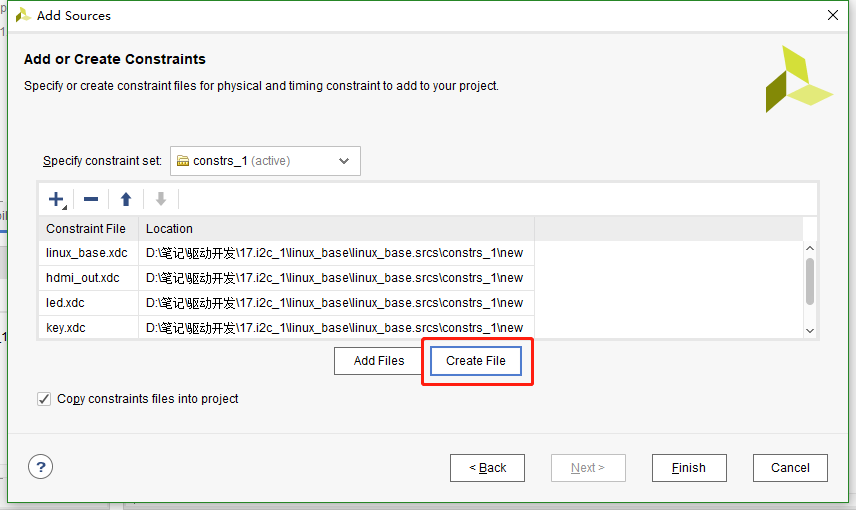
下一个界面点击Create File。
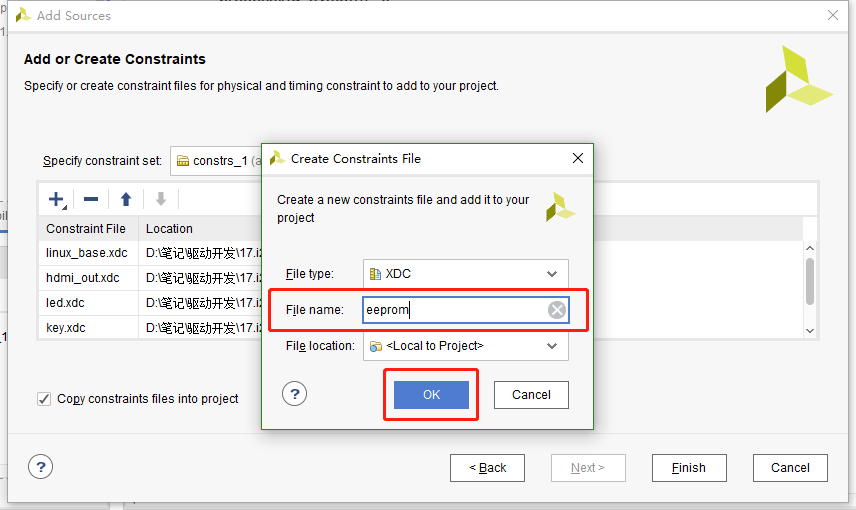
命名为eeprom,点击OK。
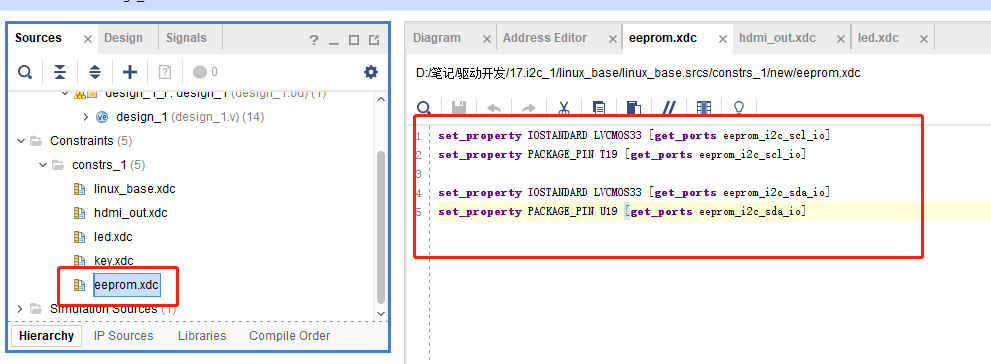
然后点击finish,之后在constrs_1中就有了刚才新建的文件。打开这个文件添加下面的代码:
set_property IOSTANDARD LVCMOS33 [get_ports eeprom_i2c_scl_io] set_property PACKAGE_PIN T19 [get_ports eeprom_i2c_scl_io] set_property IOSTANDARD LVCMOS33 [get_ports eeprom_i2c_sda_io] set_property PACKAGE_PIN U19 [get_ports eeprom_i2c_sda_io] |
这样pl端就配置好了,重新编译导出硬件信息,再使用petalinux重新制作linux系统,这个过程就不再重复说了。
eeprom的使用可以参考24AA04/24LC04B。
设备树#
打开system-user.dtsi文件,在根目录外添加下面的节点:
&i2c1 {
clock-frequency = <100000>;
ax-e2p1@50 {
compatible = "ax-e2p1";
reg = <0x50>;
};
};
第1行应用i2c1节点,因为上面我们vivado中配置引脚时,把eeprom的引脚约束到i2c1上了,所以设备树中需要对应的添加在i2c_1节点中。
第2行设置i2c_1的时钟为100hz。
第4行添加eeprom的节点ax-e2p1@50,设备地址为50。添加compatible属性等于”x-e2p1”,用于和驱动匹配。添加reg属性等于设备地址0x50。
驱动程序#
使用 petalinux新建名为”ax-i2c”驱劢程序,并执行 petalinux-config -c rootfs 命令选上新增的驱动程序。
在ax-i2c.c文件中输入下面的代码:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/string.h>
#include <linux/timer.h>
#include <linux/i2c.h>
#include <linux/irq.h>
#include <linux/wait.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/fcntl.h>
#include <linux/platform_device.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
/* 驱动个数 */
#define AX_I2C_CNT 1
/* 设备节点名称 */
#define AX_I2C_NAME "ax_i2c_e2p"
struct ax_i2c_dev {
dev_t devid; //设备号
struct cdev cdev; //字符设备
struct class *class; //类
struct device *device; //设备
int major; //主设备号
void *private_data; //用于在probe函数中获取client
};
/* 声明设备结构体变量 */
struct ax_i2c_dev axi2cdev;
/* i2c数据读取
* struct ax_i2c_dev *dev : 设备结构体
* u8 reg : 数据在目标设备中的地址
* void *val : 数据buffer首地址
* int len :数据长度
*/
static int ax_i2c_read_regs(struct ax_i2c_dev *dev, u8 reg, void *val, int len)
{
int ret;
/* 构建msg, 读取时一般使用一个至少两个元素的msg数组
第一个元素用于发送目标数据地址(写), 第二个元素发送buffer地址(读) */
struct i2c_msg msg[2];
/* 从设备结构体变量中获取client数据 */
struct i2c_client *client = (struct i2c_client *)dev->private_data;
/* 构造msg */
msg[0].addr = client->addr; //设置设备地址
msg[0].flags = 0; //标记为写, 先给eeprom发送读取数据的所在地址
msg[0].buf = ® //读取数据的所在地址
msg[0].len = 1; //地址数据长度, 只发送首地址的话长度就为1
msg[1].addr = client->addr; //设置设备地址
msg[1].flags = I2C_M_RD; //标记为读
msg[1].buf = val; //数据读出的buffer地址
msg[1].len = len; //读取数据长度
/* 调用i2c_transfer发送msg */
ret = i2c_transfer(client->adapter, msg, 2);
if(2 == ret)
{
ret = 0;
}
else
{
printk("i2c read failed %d\r\n", ret);
ret = -EREMOTEIO;
}
return ret;
}
/* i2c数据写入
* struct ax_i2c_dev *dev : 设备结构体
* u8 reg : 数据在目标设备中的地址
* void *val : 数据buffer首地址
* int len :数据长度
*/
static s32 ax_i2c_write_regs(struct ax_i2c_dev *dev, u8 reg, u8 *buf, int len)
{
int ret;
/* 数据buffer */
u8 b[100] = {0};
/* 构建msg */
struct i2c_msg msg;
/* 从设备结构体变量中获取client数据 */
struct i2c_client *client = (struct i2c_client *)dev->private_data;
/* 把写入目标地址放在buffer的第一个元素中首先发送 */
b[0] = reg;
/* 把需要发送的数据拷贝到随后的地址中 */
memcpy(&b[1], buf, 100 > len ? len : 100);
/* 构建msg */
msg.addr = client->addr; //设置设备地址
msg.flags = 0; //标记为写
msg.buf = b; //数据写入的buffer地址
msg.len = len + 1; //写入的数据长度, 因为除了用户数据外,
//还需要发送数据地址所以要+1
/* 调用i2c_transfer发送msg */
ret = i2c_transfer(client->adapter, &msg, 1);
if(1 == ret)
{
ret = 0;
}
else
{
printk("i2c write failed %d\r\n", ret);
ret = -EREMOTEIO;
}
return ret;
}
/* open函数实现, 对应到Linux系统调用函数的open函数 */
static int ax_i2c_open(struct inode *inode, struct file *filp)
{
/* 设置私有数据 */
filp->private_data = &axi2cdev;
return 0;
}
/* read函数实现, 对应到Linux系统调用函数的read函数 */
static ssize_t ax_i2c_read(struct file *file, char __user *buf, size_t size, loff_t *offset)
{
/* 获取私有数据 */
struct ax_i2c_dev *dev = (struct ax_i2c_dev *)file->private_data;
/* 读取数据buffer */
char b[100] = {0};
int ret = 0;
/* 从0地址开始读, 这里只是为了实验方便使用了read并且把地址写死了,
实际的应用中不应该在驱动中把地址写死, 可以尝试使用iotcl去实现灵活的方法 */
ax_i2c_read_regs(dev, 0x00, b, 100 > size ? size : 100);
/* 把读取到的数据拷贝到用户读取的地址 */
ret = copy_to_user(buf, b, 100 > size ? size : 100);
return 0;
}
/* write函数实现, 对应到Linux系统调用函数的write函数 */
static ssize_t ax_i2c_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
/* 获取私有数据 */
struct ax_i2c_dev *dev = (struct ax_i2c_dev *)file->private_data;
/* 写入数据的buffer */
static char user_data[100] = {0};
int ret = 0;
/* 获取用户需要发送的数据 */
ret = copy_from_user(user_data, buf, 100 > size ? size : 100);
if(ret < 0)
{
printk("copy user data failed\r\n");
return ret;
}
/* 和读对应的从0开始写 */
ax_i2c_write_regs(dev, 0x00, user_data, size);
return 0;
}
/* release函数实现, 对应到Linux系统调用函数的close函数 */
static int ax_i2c_release(struct inode *inode, struct file *filp)
{
return 0;
}
/* file_operations结构体声明 */
static const struct file_operations ax_i2c_ops = {
.owner = THIS_MODULE,
.open = ax_i2c_open,
.read = ax_i2c_read,
.write = ax_i2c_write,
.release = ax_i2c_release,
};
/* probe函数实现, 驱动和设备匹配时会被调用 */
static int axi2c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
printk("eeprom probe\r\n");
/* 构建设备号 */
alloc_chrdev_region(&axi2cdev.devid, 0, AX_I2C_CNT, AX_I2C_NAME);
/* 注册设备 */
cdev_init(&axi2cdev.cdev, &ax_i2c_ops);
cdev_add(&axi2cdev.cdev, axi2cdev.devid, AX_I2C_CNT);
/* 创建类 */
axi2cdev.class = class_create(THIS_MODULE, AX_I2C_NAME);
if(IS_ERR(axi2cdev.class))
{
return PTR_ERR(axi2cdev.class);
}
/* 创建设备 */
axi2cdev.device = device_create(axi2cdev.class, NULL, axi2cdev.devid, NULL, AX_I2C_NAME);
if(IS_ERR(axi2cdev.device))
{
return PTR_ERR(axi2cdev.device);
}
axi2cdev.private_data = client;
return 0;
}
/* remove函数实现, 驱动卸载时会被调用 */
static void axi2c_remove(struct i2c_client *client)
{
/* 删除设备 */
cdev_del(&axi2cdev.cdev);
unregister_chrdev_region(axi2cdev.major, AX_I2C_CNT);
/* 注销类 */
device_destroy(axi2cdev.class, axi2cdev.devid);
class_destroy(axi2cdev.class);
}
/* of匹配表, 设备树下的匹配方式 */
static const struct of_device_id axi2c_of_match[] =
{
{ .compatible = "ax-e2p1"},
{/* sentinel */}
};
/* 传统的id_table匹配方式 */
static const struct i2c_device_id axi2c_id[] = {
{"ax-e2p1"},
{}
};
/* 声明并初始化i2c驱动 */
static struct i2c_driver axi2c_driver = {
.driver = {
.owner = THIS_MODULE,
.name = "ax-e2p1",
/* 用of_match_table匹配 */
.of_match_table = axi2c_of_match,
},
/* 使用传统的方式匹配 */
.id_table = axi2c_id,
.probe = axi2c_probe,
.remove = axi2c_remove,
};
/* 驱动入口函数 */
static int __init ax_i2c_init(void)
{
/* 在入口函数中调用i2c_add_driver, 注册驱动 */
return i2c_add_driver(&axi2c_driver);
}
/* 驱动出口函数 */
static void __exit ax_i2c_exit(void)
{
/* 在出口函数中调用i2c_add_driver, 卸载驱动 */
i2c_del_driver(&axi2c_driver);
}
/* 标记加载、卸载函数 */
module_init(ax_i2c_init);
module_exit(ax_i2c_exit);
/* 驱动描述信息 */
MODULE_AUTHOR("Alinx");
MODULE_ALIAS("pwm_led");
MODULE_DESCRIPTION("I2C EEPROM driver");
MODULE_VERSION("v1.0");
MODULE_LICENSE("GPL");
34行添加一个void指针用于获取client。
45行到78行实现一个通用的i2c读取的函数。i2c读取中构建msg一般构建一个两个元素的数组,第一个msg标记为写用于发送目标数据地址, 第二个msg标记为读。
86行到121行实现通用的i2c写函数。
127行在open函数中设置私有数据。
132行实现read函数,调用前面实现的通用读函数。
149行实现write函数,里面调用了前面实现的通用写函数。
185行实现probe函数,内容就是字符设备的注册。
209行实现把probe输入参数的client赋值给设备结构体变量中的私有数据。在i2c读写函数中会用到的ax_i2c_dev类型句柄。
227行定义of匹配表,compatible字段和设备树中的保持一致。
234行定义一个id_table用于传统的方式匹配。
240行声明并初始化i2c_driver。
257行在驱动入口函数中使用i2c_add_driver函数注册i2c驱动。i2c_add_driver函数是对i2c_register_driver的封装,省去了输入THIS_MODULE。
264行在驱动出口函数中使用i2c_del_driver删除驱动。
测试程序#
新建 QT 工程名为”ax-i2c-test”,新建 main.c,输入下面的代码:
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include "assert.h"
int main(int argc, char *argv[])
{
int fd, ret;
char *filename;
char buffer[3] = {0};
if(argc != 2)
{
printf("Error Usage\r\n");
return -1;
}
filename = argv[1];
fd = open(filename, O_RDWR);
if(fd < 0)
{
printf("file %s open failed\r\n", argv[1]);
return -1;
}
/* 随便写入一些数据 */
buffer[0] = 0x5A;
buffer[1] = 0x55;
buffer[2] = 0xAA;
ret = write(fd, buffer, sizeof(buffer));
if(ret < 0)
{
printf("write failed\r\n");
}
/* 在控制台打印写入的数据 */
printf("write data %X, %X, %X\r\n", buffer[0], buffer[1], buffer[2]);
/* 初始化buffer, 再用来读取数据 */
memset(buffer, 0, sizeof(buffer));
/* 读出数据 */
ret = read(fd, buffer, sizeof(buffer));
if(ret < 0)
{
printf("read failed\r\n");
}
/* 在控制台打印读出的数据 */
printf("read data %X, %X, %X\r\n", buffer[0], buffer[1], buffer[2]);
close(fd);
return 0;
}
测试程序就是简单的读写并分别打印出来,比较读写结果。
运行测试#
测试方法步骤如下:
mount -t nfs -o nolock 192.168.1.107:/home/alinx/work /mnt cd /mnt mkdir /tmp/qt mount qt_lib.img /tmp/qt cd /tmp/qt source ./qt_env_set.sh cd /mnt insmod ./ax-i2c.ko cd ./build-ax_i2c_test-ZYNQ-Debug/ ./ax_i2c_test /dev/ax_i2c_e2p |
IP 和路径根据实际情况调整。
串口工具中的调试结果如下:
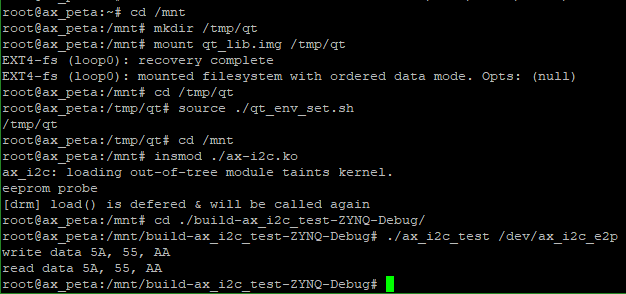
读写结果一致,试验成功。